BroomBroom! Evaluation of Leaning and Controller-based Locomotion for Flying in Virtual Reality
DOI: https://doi.org/10.1145/3756884.3766017
VRST '25: 31st ACM Symposium on Virtual Reality Software and Technology, Montreal, QC, Canada, November 2025
Virtual Reality (VR) locomotion methods are mainly ground-based, room-scale, or discrete, making them ill-suited for flying experiences. Although leaning- and controller-based techniques are promising for flying in VR, we lack empirical evidence of their advantages. We compared combinations of leaning- and controller-based methods for steering and velocity in a user study (N = 24) using a broom metaphor to integrate these methods into an understandable locomotion reference. The steering methods were: 1) controller-pointing (CP) and 2) headset-leaning (HL); and for velocity control: 1) controller linear displacement (CLD) and 2) headset linear displacement (HLD). Results indicate that HL increase presence compared to CP. However, combining HL with CLD worsens coin collection rate, completion time, mental load, control factor ratings, and enjoyment. In contrast, HLD worked well when paired with either steering method. CP-CLD led to the highest coin collection rate and lowest mental load. All methods had comparable feelings of flying.
ACM Reference Format:
Martin Hedlund, Florian Müller, Martin Schmitz, Cristian Bogdan, Remy Rey, Pooria Ghavamian, Deirdre Tobin, and Andrii Matviienko. 2025. BroomBroom! Evaluation of Leaning and Controller-based Locomotion for Flying in Virtual Reality. In 31st ACM Symposium on Virtual Reality Software and Technology (VRST '25), November 12--14, 2025, Montreal, QC, Canada. ACM, New York, NY, USA 12 Pages. https://doi.org/10.1145/3756884.3766017

1 Introduction
Over the years, humankind has achieved the great goal of flying but still has to rely on large and complicated machines that can only be piloted by experts [14]. As a result, flying loses a certain element of the feeling of freedom and overcoming the natural limits of being human. However, while the rules of physics limit us in reality, they are optional in the virtual world. Thus, virtual worlds can become places of escape from reality, where we can turn our dreams into a (virtual) reality (VR), including unrestricted flying without mechanical assistance. To provide a means of flying in a virtual environment, a locomotion technique is needed, which is a combination of interaction techniques to control the main components of locomotion: steering and velocity [11]. However, as flying is not innate to humans, flying techniques beyond ’cockpit’ interfaces have been challenging to achieve [27, 41, 49, 74]. While numerous locomotion methods have been proposed throughout the years [17, 59], they are mainly for ground-based 2D locomotion [42]. Still to this day, most VR applications rely on room-scale walking, teleportation, or joystick-based locomotion [4], limiting the range of experiences that VR users are interested in [58]. Moreover, many locomotion techniques do not provide embodied (proprioceptive and vestibular) self-motion cues. This could reduce the plausibility of locomotion, which reduces presence [70, 71] and can cause unwanted side effects such as VR sickness, disorientation, and increased mental load [22, 55, 60]. However, many forms of embodied locomotion controls are often harder to control precisely, leading to poor maneuverability and reduced user satisfaction [6, 26, 34, 47, 51]. With the advent of modern virtual reality equipment, users’ body motions can be accurately tracked in 6 degrees-of-freedom using the VR controllers and headset. This offers an accessible approach to embodied locomotion without expensive external equipment. Therefore, we set out to investigate how VR flying with good maneuverability could be achieved using these input sources.
Controller-based techniques employ the VR controller's position and orientation as input for locomotion. These techniques have been extensively explored through the use of pointing-based steering [11, 13, 16, 28, 53, 72], which facilitates easy and intuitive navigation. While not overtly physical, controller-pointing can provide embodied locomotion through physical body rotations [61]. We created a technique based on controller-pointing for directional input. Controller-based velocity, on the other hand, is often relegated to button or joystick input [17], neglecting embodied motions (discounting climbing simulations [4], which are not applicable for flying). We, therefore, created an embodied controller-based velocity method based on a metaphor of wind resistance. Leaning-based locomotion has gained a surge of research interest in the last decade. This approach allows users to lean their bodies in the desired travel direction or map leaning magnitude to velocity [30]. While many leaning-based controls rely on external tracking devices [6, 22, 35, 47, 77, 80, 81], recent research has found that the VR headset is often sufficient for precise leaning controls and immersive embodied experiences [7, 24, 45]. For flying locomotion, these headset-based leaning controls have shown promising results compared to joystick or controller-pointing alternatives, offering improved performance, experience, and reduced VR sickness [1, 2, 25, 46]. We, therefore, developed two methods based on leaning, one for steering and one for velocity control.
In this paper, we present the first comparison (to the best of our knowledge) of controller- and leaning-based locomotion methods to explore maneuverability and an immersive “feeling of flying”.To coherently integrate the methods, we explore a broom flying metaphor to facilitate intuitive, natural, and realistic experiences as users can understand their body movements in relation to a general metaphor [5, 31, 38, 64, 65]. Simply providing means of locomotion without a coherent representation can break the illusion of plausibility, which reduces the user's sense of presence [70, 71]. We demonstrate how a broom metaphor can facilitate controller-based and leaning locomotion. To compare the controller and leaning methods, we conducted a controlled lab experiment (N=24) in which participants had to fly using the broom metaphor and collect coins as quickly and as precisely as possible (Figure 1). Leaning-based steering was found to increase presence compared to controller-pointing. However, combining leaning-based steering with controller-based velocity led to the worst coin collection rate, completion time, mental load, control factor ratings, and enjoyment, but leaning-based velocity worked well when paired with either steering method. Controller-pointing with controller linear displacement led to the highest coin collection rate and lowest mental load. All methods had comparable feelings of flying.
2 Related work
2.1 Controller-based locomotion
Controller-based locomotion in VR uses the position and orientation of controllers to navigate virtual environments, typically classified as discrete or continuous techniques [17]. The most common discrete method is teleportation [4, 12], which enables users to jump to targets without physical movement, reducing VR sickness but disrupting presence and causing disorientation [9, 11]. For flying locomotion, where the journey matters, teleportation removes this experience. Hybrid approaches like HyperJump offer continuous teleportation to balance speed and sickness reduction [3, 62], but our study focuses on full continuous locomotion to maximize flying immersion. Previous work has explored various controller-based flying locomotion methods. Continuous motion interfaces like Slider improved workload and usability over teleportation [43, 44]. The magic carpet metaphor offers head- or controller-directed steering with a spatial reference via a virtual carpet on the floor [53]. Consistent with several studies [11, 13, 16], Medeiros et al. found controller-pointing easier than head-based steering [53]. Similarly, Bowman reported that controller-pointing improved performance and comfort compared to head steering but could increase mental load [11]. Caggianese et al. and Christou et al. also found fewer errors with controller-pointing in ground locomotion [13, 16]. Furthermore, Suma et al. and Hedlund et al. showed controller-pointing enhanced target detection and navigation efficiency [28, 72].
2.2 Leaning-based locomotion
Leaning-based locomotion lets users move by leaning or taking small steps, with direction and velocity determined relative to a starting position [22, 30, 39, 47, 77]. This method engages proprioceptive and vestibular senses, enhancing immersion and presence while reducing VR sickness through vection [1, 7, 45, 47, 60, 68]. Some techniques support seated locomotion using spring-based rotating stools (e.g., ChairIO [6], NaviChair [35], MuvMan [34]) but are limited to ground movement and require extra hardware; they may offer more comfort but less vection and engagement [84]. For leaning-based flying, studies mapped body lean to vertical and rotational control (e.g., flying dragons or planes) but lacked velocity control [54, 69]. The FlexPerch limbic chair [7, 80] incorporated velocity control, though users reported feeling unsafe and fatigued due to lack of physical rotation [7]. Recent VR flying locomotion methods evolved from drone controls [1, 2, 25, 46]. The “FlyingHead” technique maps headset position to drone movement [29], while the “Modified FlyingHead” uses leaning and physical body rotation for direction and elevation [57]. The “HeadJoystick” adapts this for seated VR use, improving maneuverability, enjoyment, presence, mental load, and reducing VR sickness compared to joystick controls [1, 2, 24, 25, 45]. Liu et al. also found this method supports feelings of self-transcendence [46]. In summary, controller-based locomotion offers improved steering and intuitive navigation for ground and flying tasks, while leaning-based techniques show promise over joysticks. This paper compares controller- and leaning-based methods to evaluate their strengths and weaknesses for flying VR locomotion.
2.3 Broom locomotion
Previous use of broom metaphors has relied on combinations of leaning-based and controller-pointing techniques. The Hoverbroom project 1 featured seated locomotion with virtual rotations, mapping leaning magnitude to acceleration, and the controller orientation to direction. In the VR game "Broomball", users also control direction with a VR controller-pointing technique 2. In contrast to Hoverbroom, Broomball features standing locomotion with physical body rotations; however, velocity is controlled with a discrete button input instead of embodied mappings. Kirshenbaum et al. [33] demonstrated a flying locomotion technique similar to Hoverbroom, but maps velocity to the distance between the VR headset and a VR controller (attached to a stick). Although these works are closely related to our locomotion techniques, they lack empirical evaluations.
3 Locomotion Techniques
3.1 General Metaphor
Through providing a general metaphor, a VR locomotion technique can become more intuitive, natural, and realistic as users can understand their body movements in relation to a reference locomotion technique [5, 31, 38, 64, 65, 85]. While broom flying is fictional, the concept is widespread in modern pop culture [8, 40], which makes the metaphor relatable to a wide range of users. Furthermore, by introducing an egocentric reference frame (a virtual broom rendered in place of the VR controller), the metaphor provides spatial grounding [36, 52], i.e. the user understands their position in the virtual space as sitting on a broom rather than decontextually floating through the air. This can reduce the risk of balance loss, VR sickness, and fear of heights, which is often experienced in flying VR locomotion [53]. While our intent was to improve the flying experience through the use of a general metaphor, this introduces a few constraints, which we cover in the following subsections.
3.2 Steering
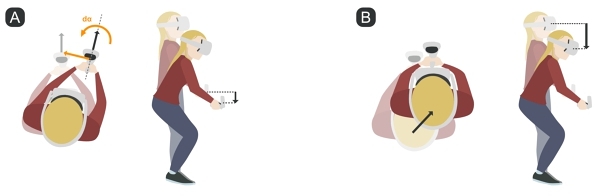
The proposed steering techniques for flying include (1) controller pointing and (2) headset leaning. Both techniques enable the user to control direction with 3DOF: forward, sideways, and vertical. For both techniques, to steer in all directions the user must physically rotate their body, i.e. we do not rotate the virtual camera. This facilitates a more embodied feeling and reduces VR sickness [25, 34]. We detail the steering techniques in the following (Figure 2).
3.2.1 Controller pointing (CP). The metaphor behind this is that the forward edge of a broom controls direction. In our case, the broom is substituted for a VR controller. The method also builds upon previous work that demonstrates the good maneuverability controller-pointing interactions typically entail [11, 13, 16, 28]. It controls the forward direction in 2D “ground” space based on the forward vector of the controller. The 1:1 mapping between the controller's forward direction and the travel direction means that users must physically rotate their bodies to steer in all 360 degrees. We also constrained steering so that the controller's forward vector must align with the user's body position. In other words, the user can't simply twist their wrists to steer but must rotate their full bodies. The constraint was added to mitigate the risk of sensory mismatch, which causes VR sickness [66], and to fit with the broom metaphor. Rotating the controller on the roll orientation, like a screwdriver, steers sideways in relation to the controller's forward direction. The bigger the roll angle, the more sideways instead of forward the user flies. To fly up and down, the user moves the controller up and down. The vertical axis controller distance from the controller's start position determines the sharpness of the vertical flight direction.
3.2.2 Headset leaning (HL). This method is based on the “HeadJoystick” steering technique [1, 2], which has been shown to facilitate a good feeling of flying and low motion sickness. An important difference, however, is that our method was adapted for standing instead of seated locomotion. Leaning to steer resembles bicycle steering, which is a familiar metaphor to most people [48, 50], and is akin to broom steering in fictional descriptions [8, 40], which should make the method understandable based on the metaphor. Both the forward and sideways direction vectors are based on the position of the VR headset in relation to its start position. In other words, a user has to lean in any direction to steer on the 2D plane. Similar to up and down with the controller pointing, the distance of the VR headset from the start position acts as input for up and down in this method. This means the user has to bend their knees as default, crouch to fly down, and rise up to fly up.
3.3 Velocity
Similarly to the steering techniques, we aimed to bring familiar metaphors for the velocity techniques. We developed two velocity techniques, where one of them is based on the controller position and the other on the headset position. We normalized the methods in terms of input values, transfer function (quadratic transformation) [21] and maximum velocity to be as comparable as possible. We outline the techniques in detail in the following (Figure 3).
3.3.1 Controller linear displacement (CLD). This method controls velocity through controller displacement from the body. The further away the VR controller is pulled from the body, the faster the velocity is. This mimics how cyclists lean forward to streamline their bodies for efficient transfer of energy and reduced wind resistance [48, 50], as extending your body to displace the controller decreases the body's angle against the wind. This is similar to Kirshenbaum et al.’s [33] velocity method for broom flying, except we use body-controller distance instead of headset-controller distance to better mimic wind resistance.

3.3.2 Headset linear displacement (HLD). As in the headset leaning steering method, this method also uses the distance between the headset and a start position as input, but for velocity instead. The greater the displacement, the greater the speed. This is the most common leaning-based velocity technique [1, 2, 30, 47], and was also leveraged in a game based on broom flying [37].
We combined the direction and velocity techniques and ended up with four experimental conditions for the evaluation. For abbreviation, we refer to the four methods as CP (controller pointing), HL (headset leaning), CLD (controller linear displacement), and HLD (headset linear displacement). The conditions are therefore referred to as CP-CLD, CP-HLD, HL-CLD, and HL-HLD.
4 Evaluation
The goal of our study was to compare the four locomotion techniques to understand their suitability for flying in virtual reality with the following research question: How do user performance, user experience and VR sickness differ between controller- and leaning-based velocity and steering control for VR flying locomotion?
4.1 Participants
We recruited 24 participants (identified as 13 F, 11 M) aged between 20 and 58 (M = 29.9, SD = 10.6) using our university's online marketing channels. Their previous experience in VR ranged between little (< 5 h) (5), moderate (5-100 h) (11), and extensive (> 100 h) (8) experience. Each participant received cinema vouchers worth 30 €.
4.2 Apparatus
The study setup consisted of a 3 x 3 m empty room space and the Meta Quest 2 headset with one controller. The test application was created with the Unity Engine (6000.0.5), using OpenXR and OculusVR assets. We used a remote server with a web interface to set condition settings and continuously record and store data. We used the Meta Quest casting to observe the participants’ view from inside the headset. For transparency and reproducibility [82, 86], the source code with transfer functions can be found on GitHub 3.
4.3 Study design and Procedure
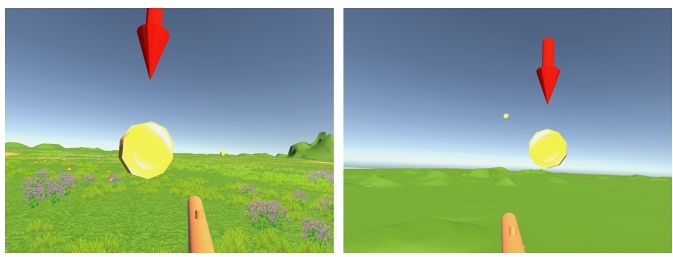
The study was within-subject with steering and velocity methods as independent variables. Both of the independent variables had two levels based on controller and headset input as described in the previous section. The study consisted of a coin collection task in which participants had to fly and collect as many coins as possible as fast as possible (15 coins in total). Participants could see 2 coins simultaneously to enable planning part of a trajectory beforehand. The closest coin was the current target indicated by an oscillating arrow above. We chose 15 coins based on the number of primitives used to create a flying trajectory. Collecting the first coin started the timer but was not counted among the 15 coins. Both collected and missed coins were accompanied by audio cues for non-visual feedback. Each flying technique reflected one experimental condition and the order of the conditions was counterbalanced using a Latin square. The virtual environment with coins was designed with mountains in the distance to facilitate height perception. For speed perception, we added wind sounds and mapped the volume and pitch to the user's current speed.
To encompass different flying maneuvers, we spawned each coin in relation to the previous (4) using four settings: (1) direction (left, right, straight), (2) distance (short, medium, long), (3) altitude (up, down, same), and (4) sharpness (smooth, default, sharp). The left or right direction maneuvers refer to a 30 degree angle compared to the current trajectory. This angle was modified +/- 15 degrees by the sharpness setting. The altitude angle was 10 degrees up or down as default, and modified +/- 5 degrees by the sharpness setting. The default distance between coins was 400m, modified +/- 200m with the distance setting. Each option was used five times per track, i.e., 5 x 3 = 15 coins, making each track comparable. Four tracks were created in total. The four tracks were always completed in sequential order (1–4). Counterbalancing of conditions across participants ensured that path assignment remained balanced and unbiased.
After obtaining informed consent, we collected participants’ demographic data and provided an overview of flying techniques. Participants familiarized themselves with the VR environment and techniques during a test ride before each condition. After each condition, participants answered the study questionnaires. At the end of the study, they ranked the methods and provided qualitative feedback. The entire study lasted approximately one hour.
4.4 Measures
We measured the following dependent variables:
- Coin collection rate: the rate of collected coins along the track.
- Coin offset: for missed coins, we measured how close participants flew by it.
- Task completion time: time it took participants to finish a track.
- Traveled distance: the traveled distance from the start until the end of the track.
- VR Sickness: Participants assessed the CyberSickness in Virtual Reality Questionnaire (CSQ-VR) (7-point scale, 6 questions) due to validity concerns with the SSQ for VR locomotion [32, 75].
- Perceived exertion: Participants completed the Borg CR10 Rating of Perceived Exertion (RPE) to estimate their level of physical exertion (10-point scale, 1 question) [10].
- Mental workload: Participants reported their perceived workload using the NASA Task Load Index (20-point scale, 6 questions) [23].
- Enjoyment: We used the short form of the Physical Activity Enjoyment Scale (PACES-S) [15] to assess how much participants enjoyed each flying method (7-point scale, 5 questions).
- Feeling of presence: Participants rated their subjective feeling of presence in the virtual environment using the general presence on the Igroup Presence Questionnaire (IPQ-G) [67] (7-point scale, 1 question).
- Ease of control: Participants rated each method on the Involvement/Control (12 questions), Naturalness (3 question), and Control Factors (12 questions) of Witmer and Singer's Presence Questionnaire using a 0–10 scale [78].
- Comfort, joy, and likeness to flying: Participants rated perceived comfort, joy, and resemblance to real-world flying using a 10-point Likert scale (1 question each), identical to the questions in Zhang et al. [80] to evaluate embodied flying.
4.5 Data analysis
To analyze the quantitative data, we fitted (generalized) linear mixed-effects models estimated using REML and nloptwrap optimizer using the lme4 r package. We included velocity technique, steering technique and their interaction as predictor variables and random intercepts for the participants. To assess the significance of the fixed effects in the model, we employed Type III Wald chi-square tests due to non-parametric data (Shapiro-Wilk). For significant main effects, we calculated Bonferroni-corrected contrasts using the emmeans package. We provide further details for the individual models and potential transformations in the individual subsections of the dependent variables. To analyze the questionnaire data, we employed the Aligned-Rank Transform (ART) [79] and applied the ART-C [19] for post-hoc analysis.
5 Results
5.1 Coin collection rate
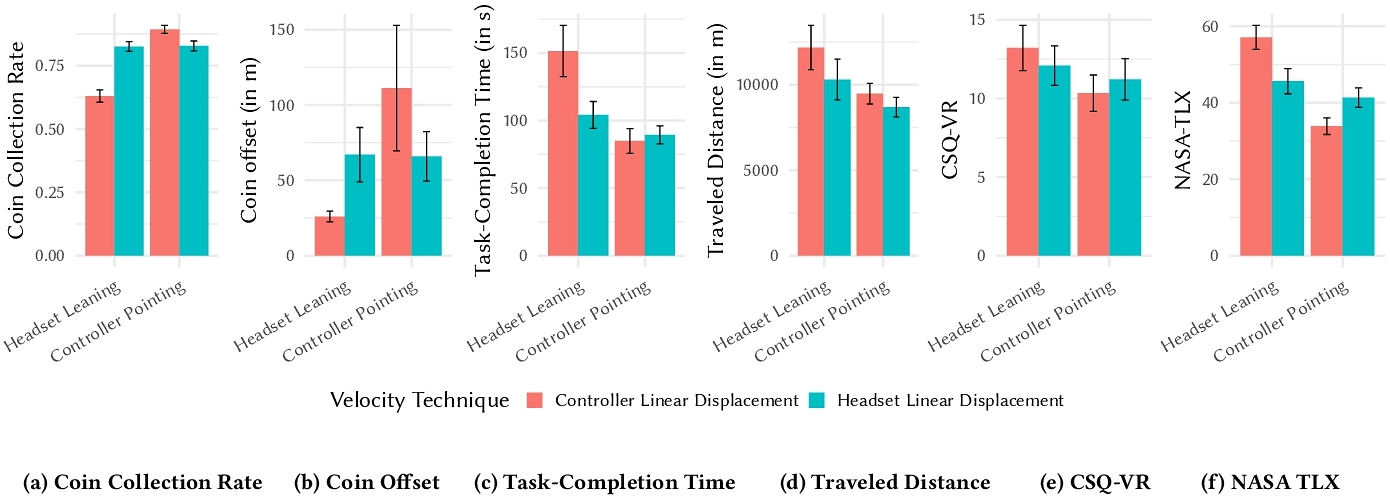
The analysis revealed a significant (χ2(1) = 47.11, p < .0001) main effect of steering technique on the accuracy. Post-hoc tests confirmed significantly higher accuracy rates for CP (M = .86, SD = .34) compared to HL (M = .72, SD = .44. Further, the analysis indicated a significant (χ2(1) = 40.64, p = .0049) main effect of the velocity technique. Post-hoc tests confirmed significantly lower accuracy rates for CLD (M = .76, SD = .42) compared to HLD (M = .82, SD = .37. Finally, we found a significant (χ2(1) = 37..63, p < .0001) interaction effect between both factors. More coins were collected with CP-CLD (M = .92, SD = .27) compared to HL-CLD (M = .65, SD = .47; p < .0001), HL-HLD (M = .86, SD = .35; p = .0298), and CP-HLD (M = .86, SD = .35; p = .0401). The same was also true of both CP-HLD and HL-HLD compared to HL-CLD (p < .0001) (5a ).
5.2 Coin offset
The analysis did not reveal significant main (steering technique: χ2(1) = 0.30, p = .6, velocity technique: χ2(1) = 0.00, p = .99) or interaction (χ2(1) = 0.01, p = .9) effects. Mean coin offsets range from M = 26m, SD = 42m for HL-CLD to M = 111m, SD = 267m for CP-HLD (5b
).
5.3 Task completion time
The analysis indicated a significant (χ2(1) = 27.72, p < .0001) main effect of the steering technique. Post-hoc tests confirmed significantly shorter TCTs for CP (M = 87.1s, SD = 38.9s) compared to HL (M = 128.0s, SD = 77.2s). Further, the analysis showed a significant (χ2(1) = 9.57, p = .0015) main effect of the velocity technique that was, however, not supported by post-hoc tests. Finally, we found a significant (χ2(1) = 8.51, p = .0035) interaction effect between both factors. HL-CLD (M = 143.3, SD = 72.9) led to slower completion than CP-CLD (M = 84.9, SD = 43.2;p < .0001), CP-HLD (M = 93.9, SD = 47.8;p = 0.0003), and HL-HLD (M = 106, SD = 53.9;p = .0172) (5c ).
5.4 Traveled distance
The analysis indicated a significant (χ2(1) = 7.33, p = .007) main effect of the steering technique on the traveled distance. Post-hoc tests confirmed significantly higher traveled distances for HL (M = 11243m, SD = 6104m) compared to CP (M = 9087m, SD = 2883m), p = .0032. The analysis did not indicate other significant main (velocity technique: χ2(1) = 0.02, p = .059) or interaction (χ2(1) = 0.10, p = .43) effects (5d ).
5.5 VR sickness (CSQ)
The analysis indicated a significant (F(1, 23) = 11.08, p = 0.0004, η2 = 0.32) main effect for steering technique. Post-hoc tests confirmed significantly higher VR sickness for HL (M = 12.6, SD = 6.57) than with CP (M = 10.8, SD = 6.02), p = 0.0005. Velocity control led to comparable VR sickness between HLD (M = 11.6, SD = 6.27) and CLD (M = 11.8, SD = 6.48). This finding was supported by the non-significant main effect for the steering (F(1, 23) = 0.13, p = 0.73, η2 = 0.006). We did not observe a significant interaction effect for steering * velocity (F(1, 23) = 4.23, p = 0.055, η2 = 0.155) (Figure 5e).
5.6 Mental load (NASA-TLX)
The analysis indicated a significant (F(1, 23) = 37.23, p < 0.0001, η2 = 0.61) main effect for steering technique. Post-hoc tests confirmed significantly higher mental load for HL (M = 51.4, SD = 16.6) than with CP (M = 37.6, SD = 12.1), is p < 0.0001. The velocity control led to a comparable mental load with HLD (M = 43.5, SD = 14.4) and CLD (M = 45.5, SD = 17.6), supported by the non-significant main effect for the velocity (F(1, 23) = 0.71, p = 0.38, η2 = 0.03). We observed a significant interaction effect for steering * velocity (F(1, 23) = 19.7, p < 0.0001, η2 = 0.46). CP-CLD (M = 33.9, SD = 10.6) led to lower mental load compared to HL-CLD (M = 57.1, SD = 15.4;p < 0.0001), HL-HLD (M = 45.6, SD = 16.0;p = 0.0004), and CP-HLD (M = 41.4, SD = 12.5;p = 0.045). HL-CLD led to higher mental load compared to HL-HLD (p = 0.006) and CP-HLD (p < 0.0001)(Figure 5f).
5.7 Perceived exertion (BORG-10)
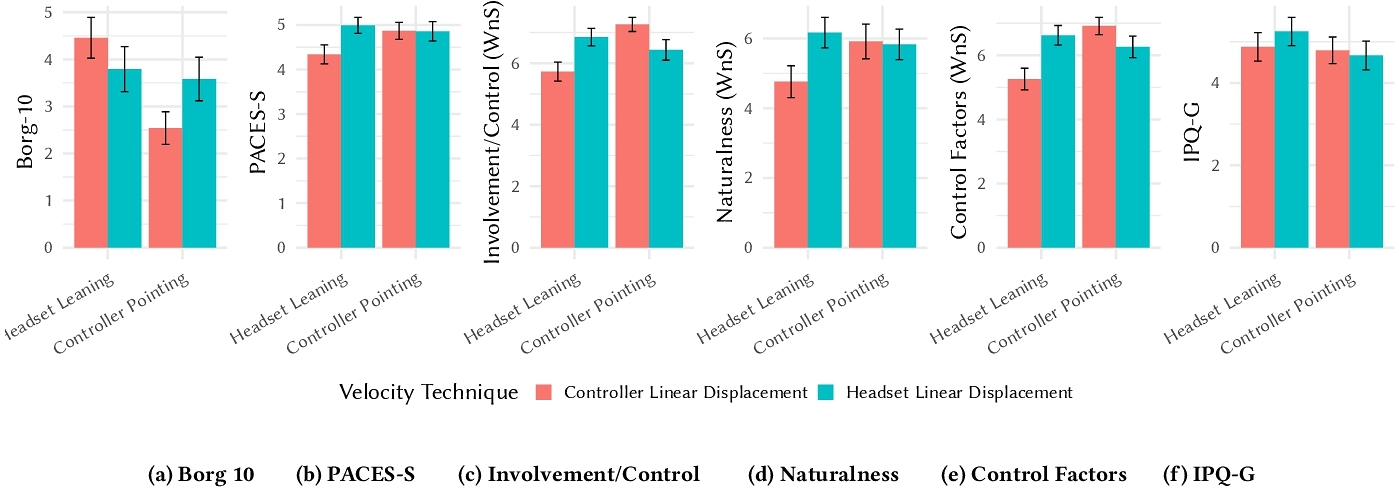
The analysis indicated a significant (F(1, 23) = 6.46, p = 0.0043, η2 = 0.22) main effect for steering technique. Post-hoc tests confirmed significantly higher perceived exertion for HL(M = 4.12, SD = 2.24) than with CP (M = 3.06, SD = 2.05), p = 0.0044. The velocity control led to a comparable perceived exertion with HLD (M = 3.69, SD = 2.28) and CLD (M = 3.5, SD = 3.69), supported by the non-significant main effect for the velocity (F(1, 23) = 0.005, p = 0.94, η2 = 0.0002). We observed a significant interaction effect for steering * velocity (F(1, 23) = 6.63, p = 0.003, η2 = 0.22). The pairwise comparison showed that CP-CLD (M = 2.54, SD = 1.69) led to lower perceived exertion than HL-CLD (M = 4.46, SD = 2.13;p = 0.0013)(Figure 6a).
5.8 Enjoyment (PACES-S)
The analysis indicated a significant (F(1, 23) = 6.11, p = 0.012, η2 = 0.21) main effect for steering technique. Post-hoc tests confirmed significantly higher enjoyment for CP(M = 4.86, SD = 0.99) than with HL (M = 4.67, SD = 1.01), p = 0.012. Further, the analysis indicated a significant (F(1, 23) = 7.70, p = 0.0015, η2 = 0.25) main effect for velocity technique. Post-hoc tests confirmed significantly higher enjoyment with HLD(M = 4.92, SD = 0.97) than with CLD (M = 4.60, SD = 1.02), p = 0.0015. Additionally, we observed a significant interaction effect for steering × velocity (F(1, 23) = 10.28, p = 0.0058, η2 = 0.31). Post-hoc comparisons revealed that HL-CLD (M = 4.34, SD = 1.05) resulted in significantly lower enjoyment than HL-HLD (M = 4.99, SD = 0.87; p = 0.0017), CP-CLD (M = 4.87, SD = 0.94; p = 0.0088), and CP-HLD (M = 4.86, SD = 1.07; p = 0.0017) (Figure 6b).
5.9 Ease of control
5.9.1 Involvement/Control (WnS). The analysis indicated a significant (F(1, 23) = 7.68, p = 0.007, η2 = 0.25) main effect for steering technique. Post-hoc tests revealed significantly higher involvement/control for CP (M = 6.85, SD = 1.45) than with steering technique (M = 6.29, SD = 1.54). The velocity control led to comparable involvement and control between headset (M = 6.64, SD = 1.52) and controller (M = 6.49, SD = 1.53), supported by the non-significant main effect for the velocity (F(1, 23) = 0.73, p = 0.33, η2 = 0.03). We observed a significant interaction effect for steering * velocity (F(1, 23) = 37.5, p < 0.0001, η2 = 0.62). CP-CLD (M = 7.26, SD = 1.12) led to higher involvement/control compared to HL-CLD (M = 5.73, SD = 1.50;p < 0.0001) and CP-HLD (M = 6.43, SD = 1.64 ;p = 0.02). HL-HLD (M = 6.85, SD = 1.39) led to higher involvement/control compared to HL-CLD (p < 0.0018)(Figure 6c).
5.9.2 Naturalness (WnS). The analysis did not reveal a significant main effect of steering technique for naturalness (F(1, 23) = 1.55, p = 0.22, η2 = 0.06), HL(M = 5.47, SD = 2.28), CP (M = 5.88, SD = 2.27). Velocity control also led to a comparable naturalness with HLD (M = 6.0, SD = 2.13) and CLD (M = 5.34, SD = 2.38), supported by the non-significant main effect for the velocity (F(1, 23) = 1.83, p = 0.09, η2 = 0.07). Finally, we observed a significant interaction effect for steering * velocity (F(1, 23) = 6.04, p = 0.037, η2 = 0.21). However, none of the pairwise comparisons were statistically significant (p > 0.05) due to the p-value correction (Figure 6d).
5.9.3 Control factors (WnS). The analysis indicated a significant (F(1, 23) = 8.2, p = 0.008, η2 = 0.26) main effect for steering technique. Post-hoc tests confirmed significantly higher control factor scores for CP (M = 6.59, SD = 1.51) than with HL(M = 5.984, SD = 1.71). Velocity control with HLD(M = 6.09, SD = 1.7) was comparable to CLD (M = 6.44, SD = 1.57), supported by the non-significant main effect for the velocity (F(1, 23) = 1.82, p = 0.11, η2 = 0.07). We observed a significant interaction effect for steering * velocity (F(1, 23) = 28.17, p < 0.0001, η2 = 0.55). HL-CLD (M = 5.26, SD = 1.65) led to lower control factor scores compared to CP-CLD (M = 6.92, SD = 1.31; p < 0.0001), HL-HLD (M = 6.63, SD = 1.50; p = 0.001), and CP-HLD (M = 6.26, SD = 1.64;p = 0.035)(Figure 6e).
5.10 Feeling of presence (IPQ-G)
The analysis indicated a significant (F(1, 23) = 5.98, p = 0.025, η2 = 0.2) main effect for steering technique. Post-hoc tests confirmed significantly higher feelings of presence with HL (M = 5.06, SD = 1.68) than with CP (M = 4.73, SD = 1.63). Velocity control led to a comparable feeling of presence with HLD (M = 4.96, SD = 1.7) and CLD (M = 4.83, SD = 1.63), supported by the non-significant main effect for the velocity (F(1, 23) = 0.62, p = 0.34, η2 = 0.026). Finally, we did not observe a significant interaction effect for steering * velocity (F(1, 23) = 2.7, p = 0.16, η2 = 0.1) (Figure 6f).
5.11 Custom questionnaires
5.11.1 I had a joyful experience. The analysis indicated a significant (F(1, 23) = 8.57, p = 0.007, η2 = 0.27) main effect for steering technique. Post-hoc tests confirmed a significantly higher joyful experience with CP(M = 8.35, SD = 2.24) than with HL (M = 7.54, SD = 2.45). Velocity control with leaning (M = 8.12, SD = 2.19) was comparable to a controller (M = 7.77, SD = 2.55), supported by the non-significant main effect for the velocity (F(1, 23) = 1.5, p = 0.23, η2 = 0.061). Finally, we observed a significant interaction effect for steering * velocity (F(1, 23) = 11.12, p = 0.003, η2 = 0.32). The pairwise comparison showed a significantly higher rating for CP-CLD (M = 8.54, SD = 2.25) over HL-CLD (M = 7, SD = 2.64, p < 0.05) (Appendix Figure 7a).
5.11.2 The method was comfortable to use. The analysis indicated a significant (F(1, 23) = 7.37, p = 0.012, η2 = 0.24) main effect for steering technique. Post-hoc tests confirmed significantly higher comfort for CP (M = 8.04, SD = 2.37) than with HL(M = 7, SD = 2.6). Velocity control with HLD (M = 7.6, SD = 2.5) was comparable to CLD (M = 7.44, SD = 2.58), supported by the non-significant main effect for the velocity (F(1, 23) = 1.04, p = 0.31, η2 = 0.04). Finally, we observed a significant interaction effect for steering * velocity (F(1, 23) = 11.56, p = 0.002, η2 = 0.33). The pairwise comparison showed a significantly higher rating for CP-CLD (M = 8.42, SD = 2.17) over HL-CLD (M = 6.46, SD = 2.64;p < 0.05)(Appendix Figure 7b).
5.11.3 I felt like I ways flying. The analysis did not reveal a significant main effect of steering technique for the feeling of flying (F(1, 23) = 0.39, p = 0.53, η2 = 0.017), HL (M = 6, SD = 2.9) CP (M = 6.29, SD = 2.58). Velocity control also led to comparable feelings of flying, supported by the non-significant main effect for the velocity (F(1, 23) = 2.18, p = 0.15, η2 = 0.087), HLD(M = 6.38, SD = 2.86), CLD (M = 5.92, SD = 2.62). We did not observe a significant interaction effect for steering * velocity (Appendix Figure 7c).
5.12 Qualitative results
Most participants preferred controlling steering and velocity with the same input modality, i.e. only headset or only controller, “It was the easiest to control. Just having to focus on one thing” [P7]. Both HL-HLD and CP-CLD were preferred by 9 participants each. Controller Pointing with Controller Linear Displacement was easy and intuitive/natural controls: “It felt like the most intuitive and natural way to fly a broomstick. Also the least mentally demanding way to fly.” [P24]. Most participants (N = 18) thought this method was the least physically demanding, with only two participants rating it as the most demanding method; 7 participants rated it highest for the feeling of flying. Headset Leaning with Headset Linear Displacement was easy and intuitive: “no distraction of different controllers for moving in the VR world, and easier to learn” [P9]. Three participants said this method was more engaging, fun, and realistic: “Felt more realistic. As you were actually flying.” [P2]. This method was rated the highest for feeling of flying (N = 10) and the most exertion inducing (N = 11). Controller Pointing with Headset Linear Displacement was preferred by five participants with realism and the feeling of control cited as reasons. Headset Leaning with Controller Linear Displacement was preferred by only one participant: “It felt most natural to steer with headset as your whole body moves along with it. Controller is also more mentally easy to control speed with. It felt safer for me to control the speed with my hand rather than with my body i.e the headset.” [P20]. Most participants rated it the worst method for feeling of flying (N = 9), but 3 participants rated it the best. Six participants rated it as the most exerting method.
6 Discussion and future work
We found that no single method was superior to the others but discovered advantages and drawbacks pertaining to both the controller- and leaning-based steering and velocity. These trade-offs should be carefully considered depending on the envisioned flying experience, and more generally for continuous 3D locomotion. We discuss the results in detail in the following subsections.
Most results showed significant main effects for steering, indicating advantages of controller-pointing over headset leaning. However, the interaction effects indicate that this was largely due to the specific combination of headset leaning with controller linear displacement (HL-CLD). This method resulted in the worst coin collection rate, completion time, mental load, control factor ratings, and enjoyment compared to the other three combinations. This method also led to increased perceived exertion, and less comfort and joy compared to the controller-pointing controller linear displacement method (CP-CLD). In contrast with leaning-based steering, the leaning-based velocity method (HLD) was compatible with either steering method, supported by the non-significant differences between HL-HLD and CP-HLD across all measures.
A plausible explanation for these results is that leaning-based steering can substantially change direction through subtle body sways, in particular, when crossing the start position. For example, if the headset is slightly to the right of the origin, crossing the origin slightly to the left would change travel direction 180 degrees. This is not an issue when velocity is simultaneously decreased, such as when steering and velocity are coupled (as in the HL-HLD method). When leaning-based steering is decoupled from velocity, however, turbulent directional changes can occur. This is unfortunate, as leaning-based steering might be suitable for a range of locomotion-based applications, e.g., motorbikes, parachutes, skis, surfboards, where velocity is naturally decoupled from direction control. We therefore encourage researchers to explore solutions that mitigate this issue.
Flying with controller-pointing and controller linear displacement (CP-CLD) led to the most coins collected and the lowest mental load compared to the other methods. CP-CLD was also rated higher for involvement/control compared to the other controller-pointing method (CP-HLD) and compared to HL-CLD. One plausible explanation is that leaning-based interaction involves larger muscles (legs) which can be less precise compared to smaller muscles (hands, arms) [56, 73, 76], and these more dexterous muscles are used in CP-CLD, making movement more accurate and nuanced. Furthermore, while we did not instruct participants to follow a designated path, the longer travel distance for leaning-based steering, in general, could potentially indicate that leaning can make flying less precise compared to a controller.
While controller-pointing with controller linear displacement affords improved precision and lower mental load, leaning-based steering seems to increase presence compared to controller-pointing. Previous studies have found leaning-based locomotion to increase users’ sense of presence and immersion compared to joystick or teleportation alternatives [1, 7, 20, 25, 45, 47].Our study adds to these findings by demonstrating that leaning-based steering also can increase presence compared to controller-pointing. Surprisingly, the results also indicated increased VR sickness with leaning-based steering over controller-pointing. Previous work has shown that leaning-based locomotion can reduce VR sickness compared to non-embodied joystick steering [2, 25, 45]. Moving the head in the direction of travel facilitates self-motion cues that reduce the perceptual mismatch [63]. So why did controller-pointing contribute less to VR sickness in this context? A plausible explanation is that controller-pointing also featured sufficient self-motion cues, as it was paired with two embodied velocity methods that also facilitated self-motion. The users also physically rotated their bodies, and the controller had to be lowered or raised, which made the user's head follow along the vertical direction of travel. Thus, the self-motion advantage of leaning over less embodied locomotion controls (e.g. joystick) was less apparent in this study. However, we are cautious with the interpretation of these findings, as recent studies have shown potential issues with carry-over effects, and the need for larger sample sizes when comparing VR sickness [83]. Future studies should validate the sickness findings before any strong conclusions could be made.
Leaning-based steering was in fact performative and well received if we only consider the leaning-only method (HL-HLD), demonstrated by the comparable results to the controller-pointing methods across most measures, including completion time, enjoyment, comfort, involvement, and control. This is interesting, especially considering that controller-pointing often leads to improved performance and comfort [11, 53], fewer errors [13, 16], and enhanced target detection and efficiency [28, 72] compared to head-directed steering. While head-directed steering couples the headset's orientation with travel direction, leaning allows the user to freely scan the environment while flying, which might contribute to the success of these methods.
Despite the increased presence of leaning, we did not find any significant differences in the perceived naturalness or feeling of flying. Previous work has shown that embodied leaning techniques are useful for eliciting feelings of flying [46, 80], but our work shows that controller-based flying can elicit similar results. This can possibly be explained by our usage of a broom metaphor. As the VR controller played the role of a physical approximation of the broomstick, flying on a broom might feel more realistic if the physical proxy directly controls locomotion instead of indirectly through leaning. This begs the question of whether an actual physical broom prop could increase the feeling further. While a VR controller does not fully represent a physical broomstick, it is more practical due to its lightweight, short size, and the fact that VR users typically have a controller, but not necessarily a broom at home. A physical broomstick proxy will also constrain user movement, which could affect maneuverability. However, physical proxies provide passive haptics, which can enhance users’ sense of embodiment and presence [18]. Future research should explore how the use of a physical broom controller impacts the feeling of flying.
7 Limitations
Our study involved a coin collection task suitable for evaluating maneuverability. However, it does not cover other locomotion tasks, e.g., search or free-exploration scenarios. The 3D environment did not feature obstacles, and participants spent around 15 minutes each in VR. Longer durations could impact proficiency with the methods, fatigue, and VR sickness [83]. Our sample of participants was between ages 20 and 58, and other age groups might yield different results. The participants also varied in familiarity with VR. We did not observe a pattern in the data related to these factors; however, larger samples are needed to verify our observation. Our methods are used standing with physical body rotations; however, seated controls and virtual rotations are potentially interesting to explore further. Likewise, general metaphors other than broom flying might yield different results and should be explored further. As it does not, to the best of our knowledge, exist an established or frequently adopted flying method for VR, the study does not compare with a baseline. Future studies might compare our methods with, e.g., a joystick-based alternative.
8 Conclusion
In this paper, we systematically investigated a combination of leaning and controller-based locomotion techniques to facilitate an embodied, precise, and intuitive flying experience in virtual reality. The results from our controlled lab experiment (N = 24) found that steering with headset leaning increases presence compared to controller-pointing. However, combining headset leaning with controller linear velocity led to the worst coin collection rate, completion time, mental load, control factor ratings, and enjoyment. In contrast, leaning-based velocity worked well when paired with either steering method. Controller-pointing with controller linear velocity led to the highest coin collection rate and lowest mental load. All methods had comparable feelings of flying.
References
- Ashu Adhikari, Abraham M. Hashemian, Thinh Nguyen-Vo, Ernst Kruijff, Markus von der Heyde, and Bernhard E. Riecke. 2021. Lean to Fly: Leaning-Based Embodied Flying can Improve Performance and User Experience in 3D Navigation. Frontiers in Virtual Reality 2 (Sept. 2021). https://doi.org/10.3389/frvir.2021.730334 Publisher: Frontiers.
- Ashu Adhikari, Bernhard E. Riecke, Abraham M. Hashemian, Thinh Nguyen-Vo, Ernst Kruijff, and Markus von der Heyde. 2021. Embodied VR Flying Improves Spatial Orientation while Reducing Cybersickness. Cognitive Processing 22, Suppl 1 (Sept. 2021). https://pub.h-brs.de/frontdoor/index/index/docId/5844 Publisher: Springer.
- Ashu Adhikari, Daniel Zielasko, Ivan Aguilar, Alexander Bretin, Ernst Kruijff, Markus von der Heyde, and Bernhard E. Riecke. 2023. Integrating Continuous and Teleporting VR Locomotion into a Seamless ‘HyperJump’ Paradigm. IEEE Transactions on Visualization and Computer Graphics 29, 12 (Dec. 2023), 5265–5281. https://doi.org/10.1109/TVCG.2022.3207157 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Craig Anderton, Chris Creed, Sayan Sarcar, and Arthur Theil. 2024. From Teleportation to Climbing: A Review of Locomotion Techniques in the Most Used Commercial Virtual Reality Applications. International Journal of Human–Computer Interaction 0, 0 (2024), 1–21. https://doi.org/10.1080/10447318.2024.2372151 Publisher: Taylor & Francis _eprint: https://doi.org/10.1080/10447318.2024.2372151.
- Alissa N. Antle, Greg Corness, and Milena Droumeva. 2009. Human-computer-intuition? Exploring the cognitive basis for intuition in embodied interaction. International Journal of Arts and Technology 2, 3 (Jan. 2009), 235–254. https://doi.org/10.1504/IJART.2009.028927 Publisher: Inderscience Publishers.
- Steffi Beckhaus, Kristopher J. Blom, and Matthias Haringer. 2007. ChairIO – the chair-based Interface. In Concepts and technologies for pervasive games: a reader for pervasive gaming research. 231–264.
- Kenan Bektaş, Tyler Thrash, Mark A. van Raai, Patrik Künzler, and Richard Hahnloser. 2021. The systematic evaluation of an embodied control interface for virtual reality. PLOS ONE 16, 12 (Dec. 2021), e0259977. https://doi.org/10.1371/journal.pone.0259977 Publisher: Public Library of Science.
- Deborah Blake. 2014. The Witch's Broom: The Craft, Lore & Magick of Broomsticks. Llewellyn Worldwide.
- Costas Boletsis and Jarl Erik Cedergren. 2019. Vr locomotion in the new era of virtual reality: An empirical comparison of prevalent techniques. Advances in Human-Computer Interaction 2019 (2019).
- Gunnar Borg. 1998. Borg's perceived exertion and pain scales. Human Kinetics, Champaign, IL, US. Pages: viii, 104.
- D.A. Bowman, D. Koller, and L.F. Hodges. 1997. Travel in immersive virtual environments: an evaluation of viewpoint motion control techniques. In Proceedings of IEEE 1997 Annual International Symposium on Virtual Reality. 45–52. https://doi.org/10.1109/VRAIS.1997.583043 ISSN: 1087-8270.
- Evren Bozgeyikli, Andrew Raij, Srinivas Katkoori, and Rajiv Dubey. 2016. Point & Teleport Locomotion Technique for Virtual Reality. In Proceedings of the 2016 Annual Symposium on Computer-Human Interaction in Play. ACM, Austin Texas USA, 205–216. https://doi.org/10.1145/2967934.2968105
- Giuseppe Caggianese, Nicola Capece, Ugo Erra, Luigi Gallo, and Michele Rinaldi. 2020. Freehand-Steering Locomotion Techniques for Immersive Virtual Environments: A Comparative Evaluation. International Journal of Human–Computer Interaction 36, 18 (Nov. 2020), 1734–1755. https://doi.org/10.1080/10447318.2020.1785151 Publisher: Taylor & Francis _eprint: https://doi.org/10.1080/10447318.2020.1785151.
- Octave Chanute. 1997. Progress in flying machines. Courier Corporation.
- Cheng Chen, Susanne Weyland, Julian Fritsch, Alexander Woll, Claudia Niessner, Alexander Burchartz, Steffen C. E. Schmidt, and Darko Jekauc. 2021. A Short Version of the Physical Activity Enjoyment Scale: Development and Psychometric Properties. International Journal of Environmental Research and Public Health 18, 21 (Jan. 2021), 11035. https://doi.org/10.3390/ijerph182111035 Number: 21 Publisher: Multidisciplinary Digital Publishing Institute.
- Chris Christou, Aimilia Tzanavari, Kyriakos Herakleous, and Charalambos Poullis. 2016. Navigation in virtual reality: Comparison of gaze-directed and pointing motion control. In 2016 18th Mediterranean Electrotechnical Conference (MELECON). 1–6. https://doi.org/10.1109/MELCON.2016.7495413 ISSN: 2158-8481.
- Massimiliano Di Luca, Hasti Seifi, Simon Egan, and Mar Gonzalez-Franco. 2021. Locomotion Vault: The Extra Mile in Analyzing VR Locomotion Techniques. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems(CHI ’21). Association for Computing Machinery, New York, NY, USA, 1–10. https://doi.org/10.1145/3411764.3445319
- Florian Dufresne, Tommy Nilsson, Geoffrey Gorisse, Enrico Guerra, André Zenner, Olivier Christmann, Leonie Bensch, Nikolai Anton Callus, and Aidan Cowley. 2024. Touching the Moon: Leveraging Passive Haptics, Embodiment and Presence for Operational Assessments in Virtual Reality. In Proceedings of the 2024 CHI Conference on Human Factors in Computing Systems(CHI ’24). Association for Computing Machinery, New York, NY, USA, 1–18. https://doi.org/10.1145/3613904.3642292
- Lisa A. Elkin, Matthew Kay, James J. Higgins, and Jacob O. Wobbrock. 2021. An Aligned Rank Transform Procedure for Multifactor Contrast Tests. In The 34th Annual ACM Symposium on User Interface Software and Technology. ACM, Virtual Event USA, 754–768. https://doi.org/10.1145/3472749.3474784
- Jacob Freiberg, Alexandra Kitson, and Bernhard E. Riecke. 2017. Development and evaluation of a hands-free motion cueing interface for ground-based navigation. In 2017 IEEE Virtual Reality (VR). 273–274. https://doi.org/10.1109/VR.2017.7892282 ISSN: 2375-5334.
- BoYu Gao, Zijun Mai, Huawei Tu, and Henry Been-Lirn Duh. 2023. Effects of Transfer Functions and Body Parts on Body-Centric Locomotion in Virtual Reality. IEEE Transactions on Visualization and Computer Graphics 29, 8 (Aug. 2023), 3670–3684. https://doi.org/10.1109/TVCG.2022.3169222 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Alyssa Harris, Kevin Nguyen, Preston Tunnell Wilson, Matthew Jackoski, and Betsy Williams. 2014. Human joystick: Wii-leaning to translate in large virtual environments. In Proceedings of the 13th ACM SIGGRAPH International Conference on Virtual-Reality Continuum and its Applications in Industry(VRCAI ’14). Association for Computing Machinery, New York, NY, USA, 231–234. https://doi.org/10.1145/2670473.2670512
- Sandra G Hart and Lowell E Staveland. 1988. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Advances in psychology. Vol. 52. Elsevier, 139–183.
- Abraham M. Hashemian, Ashu Adhikari, Ernst Kruijff, Markus von der Heyde, and Bernhard E. Riecke. 2023. Leaning-Based Interfaces Improve Ground-Based VR Locomotion in Reach-the-Target, Follow-the-Path, and Racing Tasks. IEEE Transactions on Visualization and Computer Graphics 29, 3 (March 2023), 1748–1768. https://doi.org/10.1109/TVCG.2021.3131422 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Abraham M. Hashemian, Matin Lotfaliei, Ashu Adhikari, Ernst Kruijff, and Bernhard E. Riecke. 2022. HeadJoystick: Improving Flying in VR Using a Novel Leaning-Based Interface. IEEE Transactions on Visualization and Computer Graphics 28, 4 (April 2022), 1792–1809. https://doi.org/10.1109/TVCG.2020.3025084 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Abraham M. Hashemian and Bernhard E. Riecke. 2017. Leaning-Based 360° Interfaces: Investigating Virtual Reality Navigation Interfaces with Leaning-Based-Translation and Full-Rotation. In Virtual, Augmented and Mixed Reality(Lecture Notes in Computer Science), Stephanie Lackey and Jessie Chen (Eds.). Springer International Publishing, Cham, 15–32. https://doi.org/10.1007/978-3-319-57987-02
- Martin Hedlund, Cristian Bogdan, Gerrit Meixner, and Andrii Matviienko. 2024. Rowing Beyond: Investigating Steering Methods for Rowing-based Locomotion in Virtual Environments. In Proceedings of the CHI Conference on Human Factors in Computing Systems(CHI ’24). Association for Computing Machinery, New York, NY, USA, 1–17. https://doi.org/10.1145/3613904.3642192
- Martin Hedlund, Anders Lundström, Cristian Bogdan, and Andrii Matviienko. 2023. Jogging-in-Place: Exploring Body-Steering Methods for Jogging in Virtual Environments. In Proceedings of the 22nd International Conference on Mobile and Ubiquitous Multimedia(MUM ’23). Association for Computing Machinery, New York, NY, USA, 377–385. https://doi.org/10.1145/3626705.3627778
- Keita Higuchi, Katsuya Fujii, and Jun Rekimoto. 2013. Flying head: A head-synchronization mechanism for flying telepresence. In 2013 23rd International Conference on Artificial Reality and Telexistence (ICAT). 28–34. https://doi.org/10.1109/ICAT.2013.6728902
- Joseph J. LaViola Jr, Ernst Kruijff, Ryan P. McMahan, Doug Bowman, and Ivan P. Poupyrev. 2017. 3D User Interfaces: Theory and Practice. Addison-Wesley Professional. Google-Books-ID: fxWSDgAAQBAJ.
- Vineet Kamboj, Tuhin Bhuyan, and Jayesh S. Pillai. 2019. Vertical Locomotion in VR Using Full Body Gestures. In Proceedings of the 25th ACM Symposium on Virtual Reality Software and Technology(VRST ’19). Association for Computing Machinery, New York, NY, USA, 1–2. https://doi.org/10.1145/3359996.3364770
- Robert S. Kennedy, Norman E. Lane, Kevin S. Berbaum, and Michael G. Lilienthal. 1993. Simulator Sickness Questionnaire: An Enhanced Method for Quantifying Simulator Sickness. The International Journal of Aviation Psychology 3, 3 (July 1993), 203–220. https://doi.org/10.1207/s15327108ijap03033 Publisher: Taylor & Francis _eprint: https://doi.org/10.1207/s15327108ijap0303_3.
- Nurit Kirshenbaum, Dylan Kobayashi, Ryan Theriot, Kari Noe, and Jason Leigh. 2018. Flying a Broom in a Hybrid Reality Room: Eliciting Physical Interaction. In Proceedings of the Symposium on Spatial User Interaction (Berlin, Germany) (SUI ’18). Association for Computing Machinery, New York, NY, USA, 189. https://doi.org/10.1145/3267782.3274683
- Alexandra Kitson, Abraham M. Hashemian, Ekaterina R. Stepanova, Ernst Kruijff, and Bernhard E. Riecke. 2017. Comparing leaning-based motion cueing interfaces for virtual reality locomotion. In 2017 IEEE Symposium on 3D User Interfaces (3DUI). 73–82. https://doi.org/10.1109/3DUI.2017.7893320
- Alexandra Kitson, Bernhard E. Riecke, Abraham M. Hashemian, and Carman Neustaedter. 2015. NaviChair: Evaluating an Embodied Interface Using a Pointing Task to Navigate Virtual Reality. In Proceedings of the 3rd ACM Symposium on Spatial User Interaction(SUI ’15). Association for Computing Machinery, New York, NY, USA, 123–126. https://doi.org/10.1145/2788940.2788956
- Roberta L. Klatzky, Jack M. Loomis, Andrew C. Beall, Sarah S. Chance, and Reginald G. Golledge. 1998. Spatial Updating of Self-Position and Orientation During Real, Imagined, and Virtual Locomotion. Psychological Science 9, 4 (July 1998), 293–298. https://doi.org/10.1111/1467-9280.00058 Publisher: SAGE Publications Inc.
- Maria Krinaki, Adria Cruz, Hansjörg Hofer, Wei Wang, David Ringqvist, and Lisa Schmitz. 2017. In AGI16 - Hoverbroom. https://people.kth.se/ hhofer/hoverbroom/
- Eike Langbehn, Paul Lubos, and Frank Steinicke. 2018. Evaluation of Locomotion Techniques for Room-Scale VR: Joystick, Teleportation, and Redirected Walking. In Proceedings of the Virtual Reality International Conference - Laval Virtual(VRIC ’18). Association for Computing Machinery, New York, NY, USA, 1–9. https://doi.org/10.1145/3234253.3234291
- Joseph J. LaViola. 2017. 3D user interfaces: theory and practice (second edition. ed.). Addison-Wesley, Boston.
- Martin Le Franc. 1999. Le champion des dames. Jean Du Pré.
- Daeseong Lee, Hajun Kim, Heesoo Yoon, and Wonsup Lee. 2023. Usability Comparison between 2D and 3D Control Methods for the Operation of Hovering Objects. Drones 7, 8 (Aug. 2023), 520. https://doi.org/10.3390/drones7080520 Number: 8 Publisher: Multidisciplinary Digital Publishing Institute.
- Donghae Lim, Shizuka Shirai, Jason Orlosky, Photchara Ratsamee, Yuki Uranishi, and Haruo Takemura. 2022. Evaluation of User Interfaces for Three-Dimensional Locomotion in Virtual Reality. In Proceedings of the 2022 ACM Symposium on Spatial User Interaction(SUI ’22). Association for Computing Machinery, New York, NY, USA, 1–9. https://doi.org/10.1145/3565970.3567693
- Donghae Lim, Shizuka Shirai, Jason Orlosky, Photchara Ratsamee, Yuki Uranishi, and Haruo Takemura. 2022. Evaluation of User Interfaces for Three-Dimensional Locomotion in Virtual Reality. In Proceedings of the 2022 ACM Symposium on Spatial User Interaction(SUI ’22). Association for Computing Machinery, New York, NY, USA, 1–9. https://doi.org/10.1145/3565970.3567693
- Donghae Lim, Shizuka Shirai, Jason Orlosky, Photchara Ratsamee, Yuki Uranishi, and Haruo Takemura. 2022. Exploring Three-Dimensional Locomotion Techniques in Virtual Reality. In 2022 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct). 501–502. https://doi.org/10.1109/ISMAR-Adjunct57072.2022.00105
- Zehui Lin, Xiang Gu, Sheng Li, Zhiming Hu, and Guoping Wang. 2023. Intentional Head-Motion Assisted Locomotion for Reducing Cybersickness. IEEE Transactions on Visualization and Computer Graphics 29, 8 (Aug. 2023), 3458–3471. https://doi.org/10.1109/TVCG.2022.3160232 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Pinyao Liu, Ekaterina R. Stepanova, Alexandra Kitson, Thecla Schiphorst, and Bernhard E. Riecke. 2022. Virtual Transcendent Dream: Empowering People through Embodied Flying in Virtual Reality. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems(CHI ’22). Association for Computing Machinery, New York, NY, USA, 1–18. https://doi.org/10.1145/3491102.3517677
- Maud Marchal, Julien Pettré, and Anatole Lécuyer. 2011. Joyman: A human-scale joystick for navigating in virtual worlds. In 2011 IEEE Symposium on 3D User Interfaces (3DUI). 19–26. https://doi.org/10.1109/3DUI.2011.5759212
- Andrii Matviienko, Hajris Hoxha, and Max Mühlhäuser. 2023. What does it mean to cycle in Virtual Reality? Exploring Cycling Fidelity and Control of VR Bicycle Simulators. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (Hamburg, Germany) (CHI ’23). Association for Computing Machinery, New York, NY, USA, Article 879, 15 pages. https://doi.org/10.1145/3544548.3581050
- Andrii Matviienko, Florian Müller, Martin Schmitz, Marco Fendrich, and Max Mühlhäuser. 2022. SkyPort: Investigating 3D Teleportation Methods in Virtual Environments. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems(CHI ’22). Association for Computing Machinery, New York, NY, USA, 1–11. https://doi.org/10.1145/3491102.3501983
- Andrii Matviienko, Florian Müller, Marcel Zickler, Lisa Alina Gasche, Julia Abels, Till Steinert, and Max Mühlhäuser. 2022. Reducing Virtual Reality Sickness for Cyclists in VR Bicycle Simulators. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems (New Orleans, LA, USA) (CHI ’22). Association for Computing Machinery, New York, NY, USA, Article 187, 14 pages. https://doi.org/10.1145/3491102.3501959
- Ryan P. McMahan, Doug A. Bowman, David J. Zielinski, and Rachael B. Brady. 2012. Evaluating Display Fidelity and Interaction Fidelity in a Virtual Reality Game. IEEE Transactions on Visualization and Computer Graphics 18, 4 (April 2012), 626–633. https://doi.org/10.1109/TVCG.2012.43 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Timothy P. McNamara. 2003. How Are the Locations of Objects in the Environment Represented in Memory?. In Spatial Cognition III, Christian Freksa, Wilfried Brauer, Christopher Habel, and Karl F. Wender (Eds.). Springer, Berlin, Heidelberg, 174–191. https://doi.org/10.1007/3-540-45004-111
- Daniel Medeiros, Antönio Sousa, Alberto Raposo, and Joaquim Jorge. 2019. Magic Carpet: Interaction Fidelity for Flying in VR. IEEE Transactions on Visualization and Computer Graphics (2019).
- Jenifer Miehlbradt, Alexandre Cherpillod, Stefano Mintchev, Martina Coscia, Fiorenzo Artoni, Dario Floreano, and Silvestro Micera. 2018. Data-driven body–machine interface for the accurate control of drones. Proceedings of the National Academy of Sciences 115, 31 (July 2018), 7913–7918. https://doi.org/10.1073/pnas.1718648115 Publisher: Proceedings of the National Academy of Sciences.
- Thinh Nguyen-Vo, Bernhard E. Riecke, Wolfgang Stuerzlinger, Duc-Minh Pham, and Ernst Kruijff. 2021. NaviBoard and NaviChair: Limited Translation Combined with Full Rotation for Efficient Virtual Locomotion. IEEE Transactions on Visualization and Computer Graphics 27, 1 (Jan. 2021), 165–177. https://doi.org/10.1109/TVCG.2019.2935730 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Vassilis Paschalis, Michalis G Nikolaidis, Giannis Giakas, Athanasios Z Jamurtas, and Yiannis Koutedakis. 2009. Differences between arms and legs on position sense and joint reaction angle. The Journal of Strength & Conditioning Research 23, 6 (2009), 1652–1655. https://doi.org/10.1519/JSC.0b013e3181b4382d
- Corey Pittman and Joseph J. LaViola. 2014. Exploring head tracked head mounted displays for first person robot teleoperation. In Proceedings of the 19th international conference on Intelligent User Interfaces(IUI ’14). Association for Computing Machinery, New York, NY, USA, 323–328. https://doi.org/10.1145/2557500.2557527
- John Porter and Andrew Robb. 2019. An Analysis of Longitudinal Trends in Consumer Thoughts on Presence and Simulator Sickness in VR Games. In Proceedings of the Annual Symposium on Computer-Human Interaction in Play(CHI PLAY ’19). Association for Computing Machinery, New York, NY, USA, 277–285. https://doi.org/10.1145/3311350.3347159
- Lisa Marie Prinz, Tintu Mathew, and Benjamin Weyers. 2023. A Systematic Literature Review of Virtual Reality Locomotion Taxonomies. IEEE Transactions on Visualization and Computer Graphics 29, 12 (Dec. 2023), 5208–5223. https://doi.org/10.1109/TVCG.2022.3206915 Conference Name: IEEE Transactions on Visualization and Computer Graphics.
- Bernhard E. Riecke. 2006. Simple user-generated motion cueing can enhance self-motion perception (Vection) in virtual reality. In Proceedings of the ACM symposium on Virtual reality software and technology(VRST ’06). Association for Computing Machinery, New York, NY, USA, 104–107. https://doi.org/10.1145/1180495.1180517
- Bernhard E. Riecke, Bobby Bodenheimer, Timothy P. McNamara, Betsy Williams, Peng Peng, and Daniel Feuereissen. 2010. Do We Need to Walk for Effective Virtual Reality Navigation? Physical Rotations Alone May Suffice. In Spatial Cognition VII(Lecture Notes in Computer Science), Christoph Hölscher, Thomas F. Shipley, Marta Olivetti Belardinelli, John A. Bateman, and Nora S. Newcombe (Eds.). Springer, Berlin, Heidelberg, 234–247. https://doi.org/10.1007/978-3-642-14749-421
- Bernhard E. Riecke, David Clement, Ashu Adhikari, Denise Quesnel, Daniel Zielasko, and Markus von der Heyde. 2022. HyperJumping in Virtual Vancouver: Combating Motion Sickness by Merging Teleporting and Continuous VR Locomotion in an Embodied Hands-Free VR Flying Paradigm. In ACM SIGGRAPH 2022 Immersive Pavilion(SIGGRAPH ’22). Association for Computing Machinery, New York, NY, USA, 1–2. https://doi.org/10.1145/3532834.3536211
- Bernhard E. Riecke and Jörg Schulte-Pelkum. 2013. Perceptual and Cognitive Factors for Self-Motion Simulation in Virtual Environments: How Can Self-Motion Illusions (“Vection”) Be Utilized? In Human Walking in Virtual Environments: Perception, Technology, and Applications, Frank Steinicke, Yon Visell, Jennifer Campos, and Anatole Lécuyer (Eds.). Springer, New York, NY, 27–54. https://doi.org/10.1007/978-1-4419-8432-62
- Bernhard E. Riecke and Daniel Zielasko. 2020. Towards an Affordance of Embodied Locomotion Interfaces in VR: How to Know How to Move?. In 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW). 295–296. https://doi.org/10.1109/VRW50115.2020.00066
- Katja Rogers, Jana Funke, Julian Frommel, Sven Stamm, and Michael Weber. 2019. Exploring Interaction Fidelity in Virtual Reality: Object Manipulation and Whole-Body Movements. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems(CHI ’19). Association for Computing Machinery, New York, NY, USA, 1–14. https://doi.org/10.1145/3290605.3300644
- Dimitrios Saredakis, Ancret Szpak, Brandon Birckhead, Hannah A. D. Keage, Albert Rizzo, and Tobias Loetscher. 2020. Factors Associated With Virtual Reality Sickness in Head-Mounted Displays: A Systematic Review and Meta-Analysis. Frontiers in Human Neuroscience 14 (2020). https://www.frontiersin.org/articles/10.3389/fnhum.2020.00096
- Thomas W Schubert. 2003. The sense of presence in virtual environments: A three-component scale measuring spatial presence, involvement, and realness.Z. für Medienpsychologie 15, 2 (2003), 69–71.
- Philipp Schuhbauer, Laurin Muth, Julia Grötsch, Johannes Wiesneth, Johannes Dengler, Martin Kocur, and Michael Lankes. 2019. Hover Loop: A New Approach to Locomotion in Virtual Reality. In Extended Abstracts of the Annual Symposium on Computer-Human Interaction in Play Companion Extended Abstracts(CHI PLAY ’19 Extended Abstracts). Association for Computing Machinery, New York, NY, USA, 111–116. https://doi.org/10.1145/3341215.3356984
- B. Schulte, C. P. Bimberg, J. Hertel, F. Neu, P. Heidenreich, G. Bruder, and P. Lubos. 2016. Evaluation of two leaning-based control methods in a dragon riding interface. In Proceedings of the GI-Workshop VR/AR. 109–116.
- Richard Skarbez, Missie Smith, and Mary C. Whitton. 2021. Revisiting Milgram and Kishino's Reality-Virtuality Continuum. Frontiers in Virtual Reality 2 (March 2021). https://doi.org/10.3389/frvir.2021.647997 Publisher: Frontiers.
- Mel Slater. 2009. Place illusion and plausibility can lead to realistic behaviour in immersive virtual environments. Philosophical Transactions of the Royal Society B: Biological Sciences 364, 1535 (Dec. 2009), 3549–3557. https://doi.org/10.1098/rstb.2009.0138 Publisher: Royal Society.
- Evan A. Suma, Samantha L. Finkelstein, Seth Clark, Paula Goolkasian, and Larry F. Hodges. 2010. Effects of travel technique and gender on a divided attention task in a virtual environment. In 2010 IEEE Symposium on 3D User Interfaces (3DUI). 27–34. https://doi.org/10.1109/3DUI.2010.5444726
- Hideaki Takebayashi, Fumio Yagi, Kenzo Miyamoto, Shu Morioka, Shoko Miyamoto, Yutaka Takuma, Yoshikazu Inoue, Takao Okabe, and Koji Takimoto. 2009. Interaction interference between arm and leg: Division of attention through muscle force regulation. Human Movement Science 28, 6 (Dec. 2009), 752–759. https://doi.org/10.1016/j.humov.2009.04.005
- Martin Usoh, Kevin Arthur, Mary C. Whitton, Rui Bastos, Anthony Steed, Mel Slater, and Frederick P. Brooks. 1999. Walking > walking-in-place > flying, in virtual environments. In Proceedings of the 26th annual conference on Computer graphics and interactive techniques - SIGGRAPH ’99. ACM Press, Not Known, 359–364. https://doi.org/10.1145/311535.311589
- Thomas van Gemert, Niels Christian Nilsson, Teresa Hirzle, and Joanna Bergström. 2024. Sicknificant Steps: A Systematic Review and Meta-analysis of VR Sickness in Walking-based Locomotion for Virtual Reality. In Proceedings of the CHI Conference on Human Factors in Computing Systems(CHI ’24). Association for Computing Machinery, New York, NY, USA, 1–36. https://doi.org/10.1145/3613904.3641974
- Jia Wang and Rob Lindeman. 2012. Leaning-Based Travel Interfaces Revisited: Frontal versus Sidewise Stances for Flying in 3D Virtual Spaces. In Proceedings of the 18th ACM Symposium on Virtual Reality Software and Technology (Toronto, Ontario, Canada) (VRST ’12). Association for Computing Machinery, New York, NY, USA, 121–128. https://doi.org/10.1145/2407336.2407360
- M. Wells, B. Peterson, and J. Aten. 1996. The virtual motion controller: A sufficient-motion walking simulator. In Proceedings of VRAIS. Vol. 97, pp. 1–8.
- Bob G Witmer and Michael J Singer. 1998. Measuring presence in virtual environments: A presence questionnaire. Presence 7, 3 (1998), 225–240.
- Jacob O. Wobbrock, Leah Findlater, Darren Gergle, and James J. Higgins. 2011. The aligned rank transform for nonparametric factorial analyses using only anova procedures. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. ACM, Vancouver BC Canada, 143–146. https://doi.org/10.1145/1978942.1978963
- Yaying Zhang, Bernhard E. Riecke, Thecla Schiphorst, and Carman Neustaedter. 2019. Perch to Fly: Embodied Virtual Reality Flying Locomotion with a Flexible Perching Stance. In Proceedings of the 2019 on Designing Interactive Systems Conference(DIS ’19). Association for Computing Machinery, New York, NY, USA, 253–264. https://doi.org/10.1145/3322276.3322357
- Ziyue Zhao, Yue Li, and Hai-Ning Liang. 2023. LeanOn: Simulating Balance Vehicle Locomotion in Virtual Reality. In 2023 IEEE International Symposium on Mixed and Augmented Reality (ISMAR). 415–424. https://doi.org/10.1109/ISMAR59233.2023.00056 ISSN: 2473-0726.
- Daniel Zielasko, Gerd Bruder, Gregor Domes, Richard Skarbez, Mary C. Whitton, and Anthony Steed. 2024. Walking > Walking-in-Place > Flying/Steering > Teleportation? Designing Locomotion Research for Replication and Extension. In Proceedings of the 30th ACM Symposium on Virtual Reality Software and Technology(VRST ’24). Association for Computing Machinery, New York, NY, USA, 1–2. https://doi.org/10.1145/3641825.3689500
- Daniel Zielasko, Ben Rehling, David Clement, and Gregor Domes. 2024. Carry-Over Effects Ruin Your (Cybersickness) Experiments and Balancing Conditions Is Not a Solution. In 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW). 1–5. https://doi.org/10.1109/VRW62533.2024.00007
- Daniel Zielasko and Bernhard E. Riecke. 2021. To Sit or Not to Sit in VR: Analyzing Influences and (Dis)Advantages of Posture and Embodied Interaction. Computers 10, 6 (June 2021), 73. https://doi.org/10.3390/computers10060073 Number: 6 Publisher: Multidisciplinary Digital Publishing Institute.
- Daniel Zielasko and Bernhard E. Riecke. 2024. Sitting or Standing in VR: About Comfort, Conflicts, and Hazards. IEEE Computer Graphics and Applications 44, 2 (March 2024), 81–88. https://doi.org/10.1109/MCG.2024.3352349 Conference Name: IEEE Computer Graphics and Applications.
- Daniel Zielasko and Tim Weissker. 2023. Stay Vigilant: The Threat of a Replication Crisis in VR Locomotion Research. In Proceedings of the 29th ACM Symposium on Virtual Reality Software and Technology(VRST ’23). Association for Computing Machinery, New York, NY, USA, 1–10. https://doi.org/10.1145/3611659.3615697
Footnote
1 https://people.kth.se/ hhofer/hoverbroom/
2 https://store.steampowered.com/app/504630/Broomball_VR/
3 https://github.com/marthed/broom

This work is licensed under a Creative Commons Attribution 4.0 International License.
VRST '25, Montreal, QC, Canada
© 2025 Copyright held by the owner/author(s).
ACM ISBN 979-8-4007-2118-2/25/11.
DOI: https://doi.org/10.1145/3756884.3766017