HaptiCoil: Soft Programmable Buttons with Hydraulically Coupled Haptic Feedback and Sensing
DOI: https://doi.org/10.1145/3706598.3713175
CHI '25: CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, April 2025
We present HaptiCoil, an embedded system and interaction method for prototyping low-cost, compact, and customizable wide bandwidth (1-500 Hz) soft haptic buttons. HaptiCoil devices are built using mass-produced, waterproof planar micro-speakers which are adapted to direct energy to the skin using a novel hydraulic coupling mechanism. They can sense force input, using a measurement of self-inductance, and provide output in a single package, yielding a flexible all-in-one button solution. Our devices offer a wider perceptual range of tactile stimuli than industry standard approaches, while maintaining comparable power threshold levels (typical threshold under 40 mW). We detail the construction and underlying principles of our approach, as well as an extensive physical quantification of both input and output. We share psychophysical data on device bandwidth, and show three illustrative examples of how HaptiCoil buttons can implemented in use cases such as spatial computing, digital inking, and remote control.
ACM Reference Format:
Jung-Hwan Youn, Seung Heon Lee, and Craig Shultz. 2025. HaptiCoil: Soft Programmable Buttons with Hydraulically Coupled Haptic Feedback and Sensing. In CHI Conference on Human Factors in Computing Systems (CHI '25), April 26--May 01, 2025, Yokohama, Japan. ACM, New York, NY, USA 16 Pages. https://doi.org/10.1145/3706598.3713175
1 Introduction
The humble button is a core user interaction element that is older than computing itself. They are so pervasive in everyday experience that we rarely give them a second thought. Keyboards, microwave ovens, doorbells, elevators, even automobiles, each operate at the touch of a button. More recently, buttons in HCI contexts have begun to be programmable. Software defined haptic buttons, introduced in early mobile devices and popularized by the "Taptic Engine" in the Apple watch and iPhone in 2014, have proliferated in the market, making their way into laptop trackpads, gaming controllers, automotive touchscreens, and now even the sides of smartphones.
While these highly integrated solutions are slowly entering the mainstream, sometimes even without us noticing (notably with the release of the Camera Control button in the iPhone 16), designers and practitioners have limited access to iterate haptic button responses and form factor. This has been identified as a key challenge holding haptic experience (HX) design back [48]. Many haptic APIs offer exceedingly limited control over the type of haptic response a programmable button can provide, and as a result, these buttons typically serve solely as a direct replacement for their mechanical predecessors. Tactile effects are completely predefined, buried under layers of embedded hardware and software abstraction. Researchers, however, routinely desire to experiment outside of these limited effects, and a recent survey of expert haptic experience (HX) designers revealed that they list variation of haptic effect at the top of what they consider makes a "good haptic experience" [19].
Left with limited options, many researchers decide to build the entire engineered system by themselves. Often they reach for an inexpensive and small vibration motor, such as a linear resonant actuator (LRA) or eccentric rotating mass (ERM), and pair this with a easy to implement touch sensing technology (such as a self-capacitive sensor or a strain gauge force sensor). Only then do they realize the restrictions of these actuators and sensors, leaving them, once again, with a limited set of effects to play with. In order to disrupt this frustrating loop, we believe that there needs to be a proliferation of approaches and understanding on how to enable compact but highly expressive haptic buttons. By developing and showcasing examples of such devices being built, characterized, and integrated, we aim to contribute to the growing body of HX design research and methods.
In our work here, we demonstrate how it is possible to design and build an entirely self-contained touch sensor, high performance actuator, and soft coupling system in a compact and low cost way that also affords rapid prototyping and customization. These are all of the requisite components needed for a button, however we stress that HaptiCoils can also be used in any place where localized cutaneous skin actuation may be desired. During our design process we sought to balance system performance and haptic expressivity with ease of construction and practical requirements of system integration. This allows designers the freedom to explore the size, shape, and range of haptic experiences, which can later guide the engineering of these experiences into real products. After reviewing prior work, our paper walks through what a HaptiCoil is, additionally explaining the design decisions around its concept. We then discuss a typical button implementation, and perform a physical evaluation of both the actuator and sensor aspects of HaptiCoils. Finally, we perform a preliminary psychophysical experiment, offering data on the broad frequency capabilities compared to the baseline of a Linear Resonant Actuator (LRA). Finally we provide three example demo applications: a thimble type device for XR, a pen device for digital inking, and a low-profile embedded button application in a remote media control.
2 Background & Related Work
We focus on three areas of related work: miniature embedded haptic actuation, fluidic haptic approaches, and combined haptic actuation and sensing.
2.1 Miniature Embedded Haptic Actuation
Providing clear haptic feedback during both pressing and releasing actions enhances user experience by offering unambiguous system confirmation. Haptic devices can generally be categorized into passive and active devices. Passive devices offer haptic feedback by dissipating mechanical energy applied by the user, through spring mechanisms. For over a century this has been the dominant way to provide button feedback, and a range of microswitchs, capacitive membrane switches, and every manner of scissor mechanism has been implemented in keyboards, mice, and gaming controllers. Some of these mechanisms have been examined in an HCI context, such as [28, 73]. However, once constructed, passive haptic button response is unvarying.
Active haptic devices, on the other hand, provide controllable haptic feedback through external energy sources. Piezoelectric actuators, such as the commercially available TDK Powerhap and Piezohap actuators, are promising for haptic applications due to their small size, fast response, and low energy consumption [4, 32, 57]. Despite challenges such as small displacement and the need for high voltage (50-200V), companies like Boreas Technologies have introduced efficient piezo drivers that could solve the issue, though at a cost. Other compact haptic actuation methods have also been explored, the most common including shape memory alloys [13, 22, 35], electrotactile actuators [29, 61], dielectric elastomer actuators (DEAs) [17, 24, 69, 70]. The typical limitation of these technologies is their small output mobilities (ability to move large distances quickly) as well as their commercial readiness and acceptance. Even now, however, SMA and piezo based buttons are making it into certain mobile devices due to their extreme compactness.
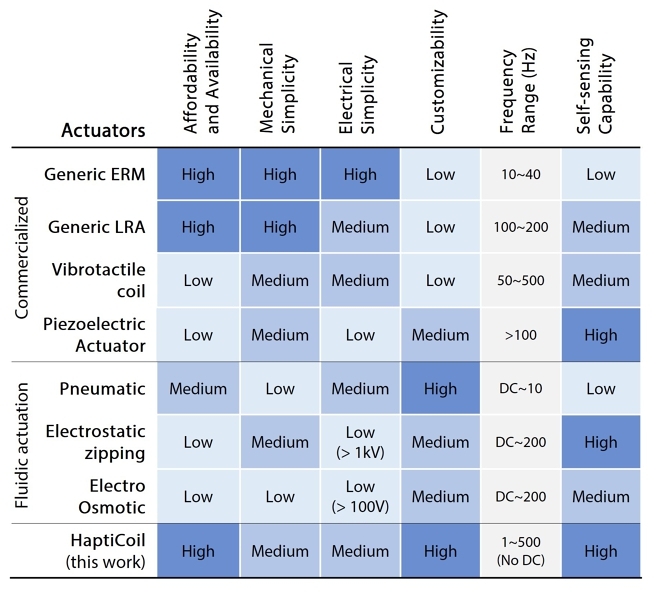
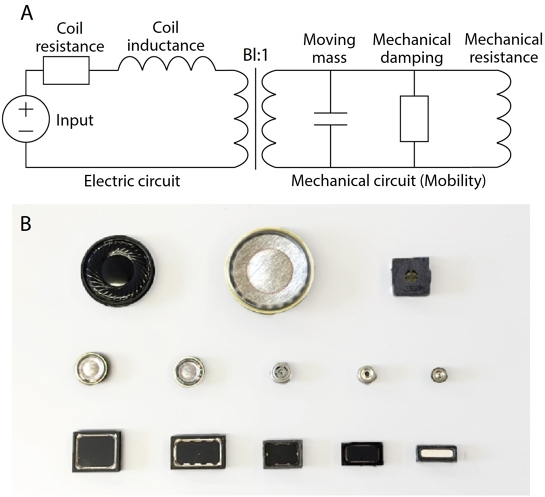
Thus, electromagnetic actuation, commercialized for over a century, remains one of the most common methods to provide haptic feedback. ERMs and LRAs offer strong vibrotactile feedback with high efficiency, with the trade-off of poor output control (ERMs) or narrow frequency range (LRAs). Various miniaturized haptic devices have been developed using commercially available ERMs [49] and LRAs [8, 20, 42, 58]. However, their limited frequency range restricts their use in more advanced haptic applications requiring "high-definition" output, and many times their form factor does not match the intended use case. To address this, researchers have also developed their own electromagnetic actuator integrations [34, 40, 45, 62]. Vibrotactile coil based products, such as Haptuator from Tactile Labs [65], and C-2 from Engineering Acoustics Inc [37], have also become the gold standard for vibrotactile research due to their broad operating frequency range (10-1000 Hz). However, their high cost ($80-$200) remains a barrier to widespread experimentation. So-called "tactile-exciters", a class of coil based actuators originally designed for bass reproduction applications, have also been used in haptics research, though typically in configuration similar to LRAs, therefore we treat them as a similar class. These devices are typically bulky and offer limited customizability, see Figure 2 for a full actuator comparison chart (categories adapted from [7]). Finally, wearable haptic devices utilizing miniature DC motors also show great potential for providing multi-DOF tactile feedback, yet are typically reserved only for static or low frequency force rendering, see [39] for a review.
2.2 Fluidic Haptic Approaches
A variety of haptic devices, including haptic buttons, shape changing devices, and wearablables, have been recent explored using fluidic (e.g. pneumatic or hydraulic) actuation.
Pneumatic systems offer strong advantages, including being lightweight and delivering high power performance. However, the need for bulky air compressors, valves, solenoids, and air supply lines to control them complicates miniaturization efforts [56]. One of the most common approaches in pneumatic-based haptic devices involves inflating and deflating soft silicone membranes using pneumatic control lines. It is so common that HCI toolkits have also been developed for easing implementation [52]. This method has been applied in dynamic haptic buttons [15], shape changing devices [66], braille devices [16, 47, 63], tactile feedback devices [6], and wearable haptic devices [31, 33, 71, 72]. Commercial approaches remain extremely high cost, and recent works have aimed developing compact pneumatic-based haptic devices by replacing external air compressors with voice-coil actuation [50, 53], electrostatic actuation [55] and even thermal actuation [60]. However, their low output force or slow actuation speed remain as a challenge.
Hydraulic actuation holds great potential for compact haptic devices due to its fast, stable, and reliable power transmission capabilities [2]. Moreover, hydraulic actuators provide good mechanical impedance matching with human skin and underlying tissue (being primarily composed of water), making them more attractive methods for haptics. The simplest hydraulic approach involves using commercially available hydraulic pumps and valves. Wearable rings [14] and pens [64] have been developed using these methods. Very recently, researchers have focused on developing compact, lightweight advanced hydraulic pump techniques, such as electrostatic zipping actuation [5, 25, 43], hydraulic coupled dielectric elastomer actuators [68], and electroosmotic pumps [44, 51, 54]. Despite these significant advancements, reliability and stability in the long term remain understudied. A notable alternative approach is described in [36], which uses human input for pumping, though this work was focused more on visual interactions rather than controllable tactile feedback. A comprehensive comparison between fluidic haptic approaches and the HaptiCoil is presented in Figure 2.
2.3 Combined Haptic Actuation and Sensing
The haptic button is an I/O interface that provides both haptic feedback and touch sensing. A simple method to achieve sensing capability is by combining haptic actuators with external sensors, such as force sensor [5, 23], accelerometers, [11] or microphones [59]. Recently, several attempts have been presented to develop self-sensing haptic actuators that integrate both tactile sensing and haptic feedback.
Piezoelectric actuators offer self-sensing capabilities by detecting the charge generated from piezoelectric effect, an effect demonstrated in [67]. DEAs also posses sensing capabilities by monitoring changes in capacitance [46]. A few researchers have presented DEA-based haptic devices with self-sensing functionality [12].
Electromagnetic actuators again are particularly promising for self-sensing, due to a strong coupling between electrical and mechanical domains. Recent research has shown that self-sensing LRAs can utilize back electromotive force (back-EMF) to detect change in velocity of the internal mass under applied pressure [9]. While these device can measure external pressure, reliable measurement of back-EMF requires disconnecting the actuator while sensing, which complicates the control circuit. Compared to back-EMF sensing, self-sensing haptic devices that actively measure low frequency current through the voice-coil can effectively detect applied pressure [8, 27, 38]. Back-EMF and low-frequency current sensing are inherently tied to the actuation waveform, requiring significant voltages (>1 V) to sense mechanical changes like damping or stiffness. This coupling limits waveform options and precludes sensing without significant actuation. For HaptiCoils, we developed a low-voltage (20 mV) sensing method at high frequency (>1 MHz), frequency decoupling it from tactile actuation (<500 Hz). Unlike back-EMF and current-sensing, which struggle with combining static (DC) and highly dynamic (>100 Hz) sensing, our high-frequency self-inductance measurement effectively detects static and rapidly changing coil displacement (and by proxy, applied force), representing what we believe is a novel and significant contribution to the field. Our method does not yet allow for truly simultaneous sensing and actuation, but we believe there may be a path to allow this.
3 HaptiCoil - Walkthrough and Design Approach
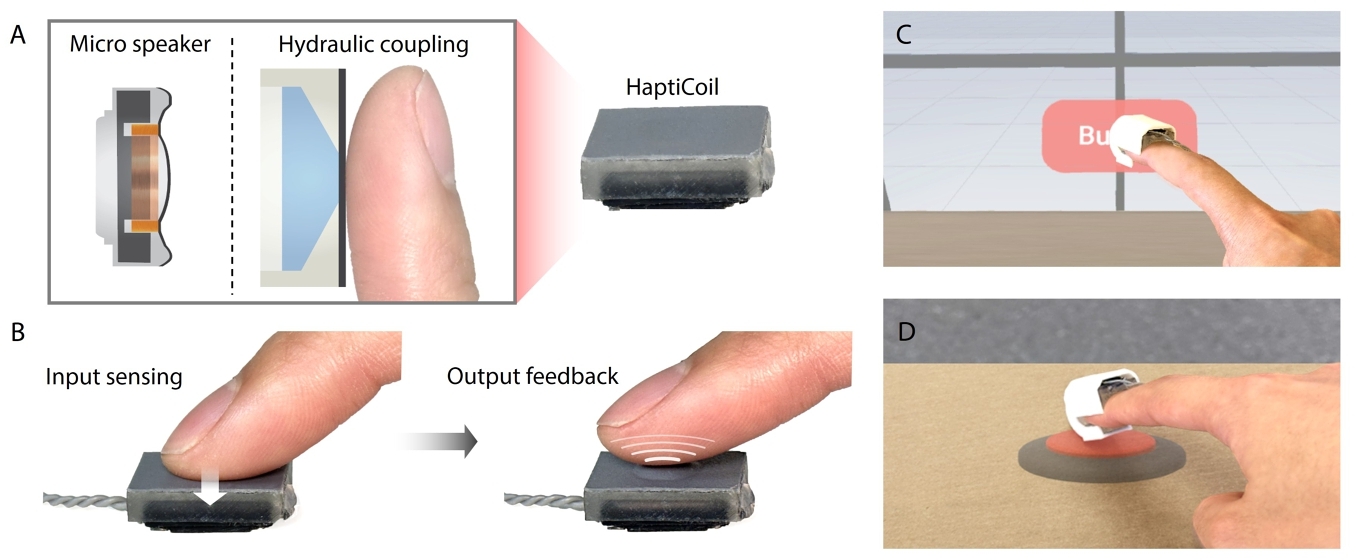
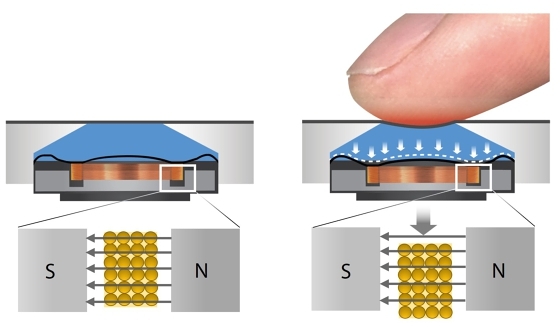
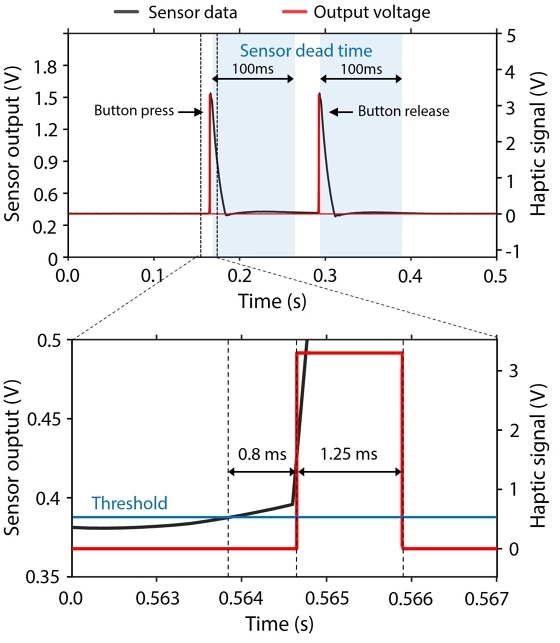
HaptiCoils operate like any other button in the sense that they can monitor user input, Figure 1 B, and provide press confirmation feedback, Figure 1 C. In a basic application, such as a push button on a remote control, a micro-controller monitors the measured self-inductance of the HaptiCoil, looking for changes to the input baseline. Once a user presses on the device surface, this deformation hydraulically couples to inner coil surface, causing it to move. This movement causes a systematic change in the self-inductance, which is seen by the micro-controller. Once the self-inductance reading changes beyond a programmable threshold, the HaptiCoil is triggered, energizing its coil with an output current and voltage. As seen Figure 3, mechanical force is coupled back to the user as a "click". If desired, a second inductance threshold can set as the user lifts their finger, providing a second release "click" akin to the passive feedback a keyboard button gives during typing. This basic interaction can also occur with a finger mounted button (see Figure 1 C and D, and Figure 20). Here, the HaptiCoil is triggered by sensing the user's position in a virtual environment (Figure 1 C) or as they interact with a physical surface (Figure 1 D).
The software defined nature of HaptiCoils allow designers to implement a wide range of input behaviors and output sensations. The construction method employed also allows researchers to play with and adjust HaptiCoils to different sizes, shapes, output powers, and specific use cases. In addition, the waterproof speaker, fluid (i.e. tap water), 3D printed enclosure, encapsulating silicone are robust, simple, and safe (See Figure 3 or Figure 4). HaptiCoils can also be adapted to other fluid coupling techniques (from microfluidics research). They allow rapid prototyping of devices, and multiple avenues for device miniaturization and optimization. Importantly, once constructed, a HaptiCoil is an entirely self-contained electromechanical system (with only 2 wires connected to drive electronics). This means that the haptic feedback is entirely localized, and will not transmit to or be affected by other parts of the device. This greatly simplifies device integration and affords more complicated devices.
Performance wise, our aim was to be uncompromising. HaptiCoils are very sensitive at their input (verified to detect at least 100 mN), and offer a broad range of haptic output (≈ 1-500 Hz, rise time on the order of 10 ms and force output of over 100 mN). This performance is enabled by the use of a highly mobile speaker voice-coil, which is directly linked to the skin and body. It is worth noting that this manner of coupling is different from LRAs and other moving-magnet type actuators, such as the "Haptuator" [65]. These devices attempt to render an acceleration (G force), which becomes harder and harder to do once the actuator is attached to additional mass (because of Newton's 2nd Law). In contrast, the moving-coil design of HaptiCoil, coupled with hydraulic routing and coupling, allow HaptiCoils to easily scale to different sizes, locations, and configurations.
4 IMPLEMENTATION
In this section we detail HaptiCoil construction, speaker selection, principles of operation (including actuation and sensing), design variations, cost, and the drive electronics.
4.1 General Construction
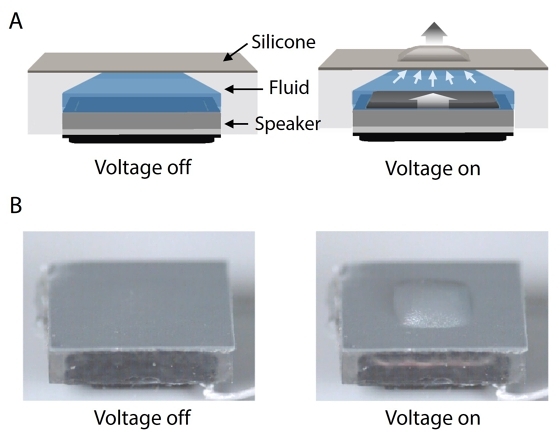
HaptiCoils are constructed from waterproof miniaturized speakers which are coupled to a soft silicone membrane via a fluid, as shown in Figure 3 A. This design combines the speaker's high bandwidth with the fast and reliable power transmission of the hydraulic system due to the incompressible nature of the fluid.
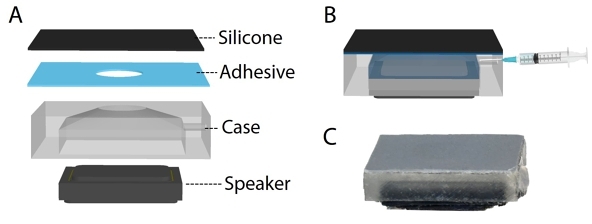
The fabrication process of our Hapticoils is presented in Figure 4. The fluid chamber is prepared by 3D-printer (Formlabs Form 4) with clear V4 resin (Formlabs). The transparent resin allows for easy inspection of trapped air bubbles, although the chamber can also be fabricated using other 3D printing materials, such as Acrylonitrile Butadiene Styrene (ABS) or Polylactic Acid (PLA). The fluid chamber is designed to be slightly larger than the speaker dimensions (chamber size= 18 × 13 × 3 mm in this case) and includes a small hole (1 × 2 mm) at one edge to facilitate fluid injection. Then, the fluid chamber is bonded to the speaker with cyanoacrylate adhesive (Loctite 401) to prevent fluid leakage. The soft touch membrane, which serves as a pressure-coupling material between the speaker and the user's skin, is a pre-cured material (Rogers HT-6000, Shore 10A, 0.25 mm thickness) purchased from McMaster-Carr. Adhesion of the silicone membrane to the fluid chamber can be difficult, but we found two reliable methods. First, a plasma surface treatment wand (Electro-Technic Products BD-20A) can applied to the soft membrane to activate its surface. The treatment wand is passed over the membrane for several seconds, then it is adhered using laser-cut pressure-sensitive adhesive (PSA) sheets (3M 467MP). Second, a cyanoacrylate adhesive (Loctite 401) can be used directly between the fluid chamber and membrane. We found the former processes more reliable and clean, and the latter process is cheaper but messier. After bonding, water is injected into the chamber, and air is evacuated using a syringe and dispensing needle through a small filling hole, which is designed in the side of the chamber wall, see Figure 4 B. We use tap water as the fluid due to is low viscosity, low toxicity, and easy of use. Finally, the filling hole is sealed with room temperature vulcanizing (RTV) silicone adhesive (Permatex 80050).
4.2 Speaker Selection
To aide in selecting a speaker we pre-screened various shapes and sizes of speakers (Figure 5 B) by measuring the Thiele/Small (T/S) parameters using a two-channel FFT analysis, similar to that used in [53]. Additionally, speakers were required to have a high IP water resistance rating. Figure 5 A presents a lumped parameter model we fit to each speaker. We selected the miniature speaker (CMS-151135-18S-X8) that has the highest BL parameter (also known as force factor) of those tested (1.22 N/A). High BL implies large output forces for a given current, and we found this to be the single most useful parameter in selection. We also sought to find speakers with low coil resistance, allowing us to apply large currents for relatively small voltages. Using this approach additional speakers on the market can be quickly pre-screened for their appropriateness in HaptiCoils.
4.3 Direct or Indirect Actuation & Output Shape Variation
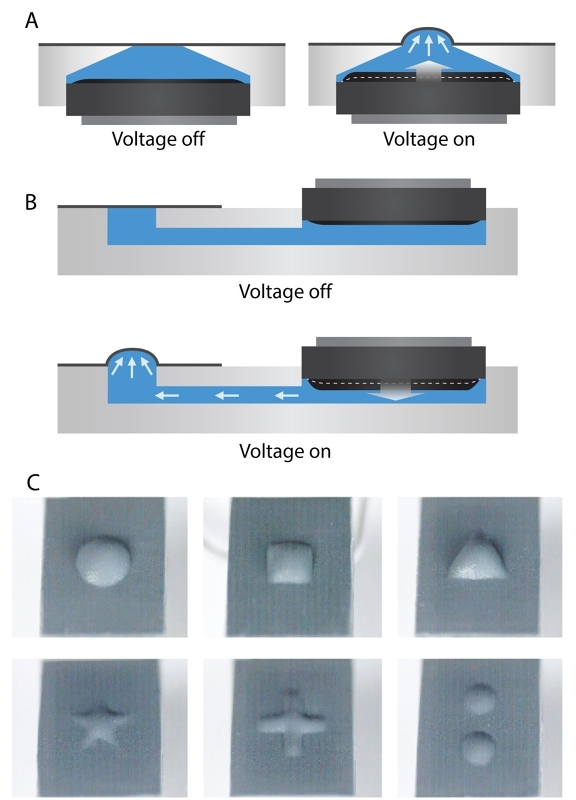
Hydraulic systems offer a distinct advantage in efficiently transmitting power from one point to another. Leveraging this advantage, a HaptiCoil can be designed using both direct and indirect actuation, as illustrated in Figure 6 A, B. In the direct case, pressure is straightforwardly focused on the touch surface. In the indirect case, the touch surface is physically separated from the actuator via a hydraulic channel. This separation affords HaptiCoil designers more flexibility to create complex structures or a dense array within a limited space. An example of this in shown later in Figure 21.
We also found that HaptiCoils are adept at providing vivid output shapes than can quickly pop up or down from the surface of the device. We believe this can lead to interesting haptic and visual output designs for shape display purposes and emphasize this point by showcasing various shaped outputs. These were achieved by changing the shape and size of HaptiCoil surface hole. Figure 6 C shows some representative shapes in the popped out configuration. During this test, we applied a square wave input a 200 ms period. Images were captured with a high-speed camera (CHRONOS 2.1-HD). Pop down shapes can be seen in Figure 22. Due to the soft nature of the membrane, the edges of the output hole can also be felt by users as a designable passive haptic effect.
4.4 Sensing principles
Sensing of applied pressure in our HaptiCoil prototypes is done through a high frequency (> 1 MHz) self-inductance measurement. Through our testing, we observed that the self-inductance of the speaker coil systematically changes as it moves inwards (positive displacement) or outwards (negative displacement) due to an externally applied force. Specifically, the self-inductance decreases when the cone moves inwards and increases when it moves outwards. We measured this phenomenon using an LCR meter operating at 200 kHz. The exact mechanism driving these inductance changes remains unclear without detailed knowledge of the coil's internal geometry and the structure of the magnetic field. We hypothesize that these inductance variations result from changes in the magnetic flux through the coil as its position shifts. If the coil moves away from the flux lines, self-inductance would decrease, which aligns with observations of similar microspeaker constructions. Furthermore, since cone displacement is hydraulically linked (Figure 7) to the displacement of the output surface, our HaptiCoil prototypes are very sensitive to surface displacement and pressing force as well.
4.5 Drive Electronics
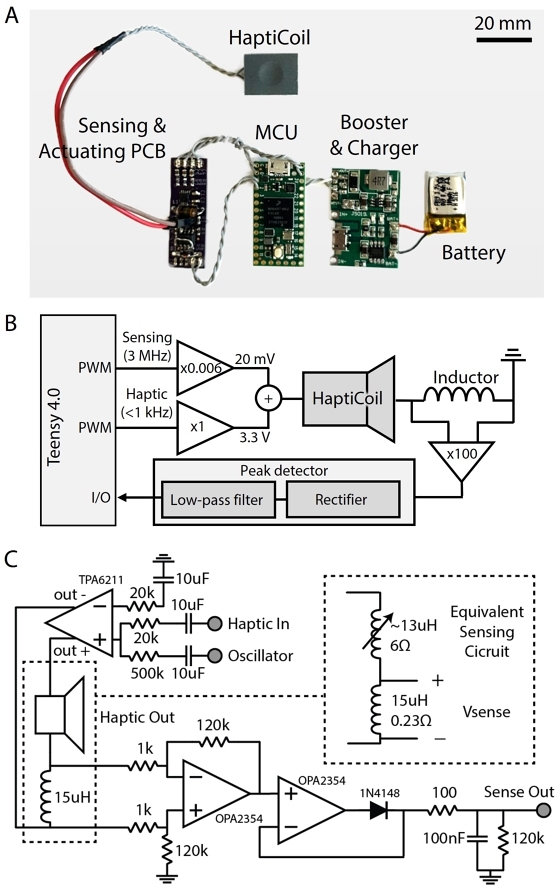
To measure the self-inductance of the speaker while maintaining the haptic operation of the speaker, we needed to build a custom control circuit (shown in Figure 8 A) which includes both actuating and sensing electronics in a single signal path. This circuit includes a small differential Class-AB audio amplifier (TI TPA6211A1), a shunt inductor, and a dual channel pre-amplifier (TI OPA2354) consisting of a high gain differential stage followed by a peak detector. A 3 MHz sense signal is injected by our micro-controller, and is added to a low frequency (<1000 Hz) haptic signal using an additive input configuration. It should be noted that the user can not feel the vibration generated by the sense signal, due to its small amplitude (20 mV) and high frequency (3 MHz). In-practice, we time multiplex these signals, meaning we are only sensing or actuating at a given time, not in combination.
Considering only the sensing path, the sensing oscillation signal is injected through the same audio amplifier that plays the haptic signal. The amplifier load is modified to include a shunt inductor in series with the speaker, as seen in Figure 8 C. Using an inductor instead of a resistor means that the shunt inductor adds minimal additional impedance at haptic frequencies. At our sensing frequency (3 MHz), however, the shunt inductance and speaker's variable self-inductance form an inductive divider, and the amplitude of the signal at Vsense is thus highly sensitive to changes in speaker self-inductance. The rest of the circuit is designed to convert this high frequency sinusoid into a rectified DC signal. The voltage is amplified using a differential op-amp with G ≈ 100, and a peak detector creates an easy to read signal for the micro-controller ADC. The sensor output has a inverse relationship with the self-inductance of the HatptiCoil due to the inductor divider relationship.
4.6 Cost
Cost is a primary consideration in our design. The main cost savings comes from the low cost of the speaker ($1.3). Remaining materials are inexpensive: silicone membrane (23¢/g), 3d printed resin (20¢/g), adhesive sheet (0.001¢/mm2), and silicone adhesive (5¢/g), which makes total cost less than $1.5. The price of the electronic sensing and actuating components per channel is less than $3.5, while our MCU board (Teensy 4.0) is a large one time cost ($23.8). We anticipate that the cost of driving electronics could come down significantly with scale, as they are all low voltage (<5 V), and are similar to the electronics in mass-produced smart style earbuds.
5 PHYSICAL EVALUATION
We characterized our HaptiCoil designs through a series of physical experiments. First, we detail the output displacement and the blocked force characteristics of the HaptiCoils at various operating frequencies. Then, we report on the force sensing capability of our prototype.
5.1 Blocked Force
One of the most important aspects of a haptic button is the output force it can provide to the skin, specifically the skin of the fingertip. Previous studies have shown that the typical pressing force during tapping a touchscreen, typing on a physical keyboard, and clicking a mouse button is around 0.5 N [1, 18, 21]. Thus, our goal for HaptiCoil was to deliver sufficient output force under this amount of preload.
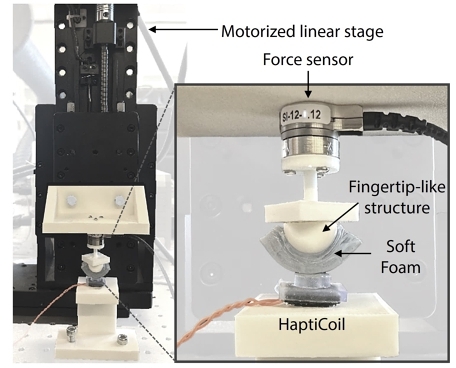
We measured blocked force using a piezoresistive strain gauge force sensor (ATI Nano17) and a fingertip-like proxy. The blocked force refers to the force generated by the HaptiCoil when its motion is completely restricted by the force sensor. The initial contact force between the HaptiCoil and the force sensor was precisely controlled using a motorized linear stage (Optics Focus MOX-02-100). We attached fingertip-like structure covered with soft foam resembling human skin to serve as a coupling between the force sensor and the HaptiCoil. A data acquisition device (NI USB-6211) generated haptic test signals various frequencies and simultaneously measured the force sensor data and the current flowing through the speaker. We tested three different HaptiCoils with output hole sizes ranging from 4 mm to 6 mm. The test setup can be seen in Figure 9.
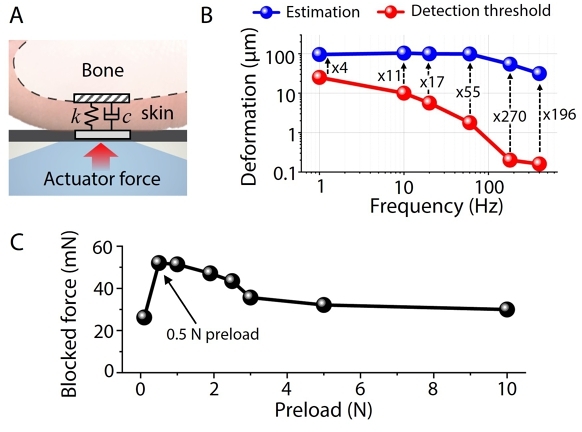
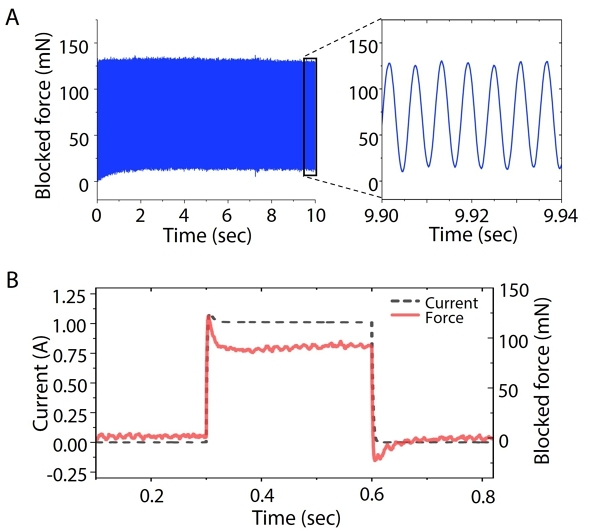
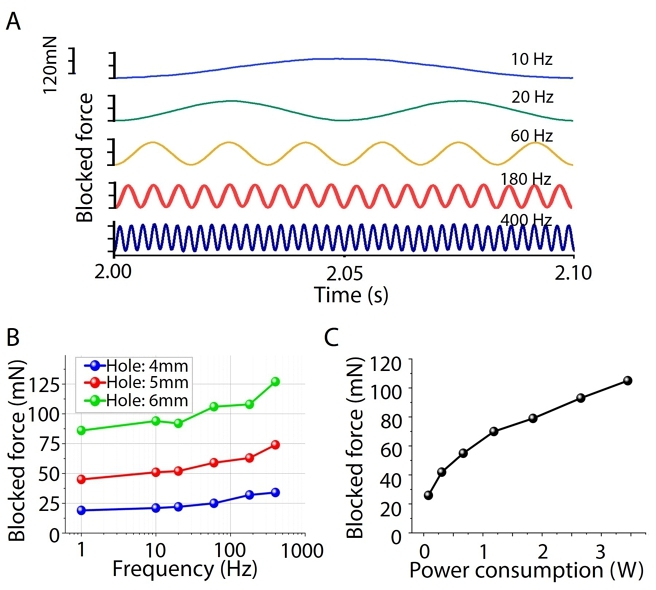
Figure 10 A shows the profile of the blocked force of the HaptiCoil at various operating frequencies (preload = 0.5 N). Results validated that our HaptiCoils can operate at all frequencies tests, from 1-400 Hz, as can be seen in Figure 10 B. The HaptiCoil with a larger hole size produces a larger output force as the output force is proportional (F = PA) to the area under the same applied pressure in a hydraulic system. We also validated that our HaptiCoil (hole size: 6 mm) can produce a controllable output force by controlling the input power, shown in Figure 10 C. To verify whether the output force of HaptiCoil is sufficient for a haptic button applications, we estimated the resulting skin deformation using a dynamic model that couples HaptiCoil with the fingerpad skin, as can be seen in Figure 11 A. The results presented in Figure 11 B demonstrated that skin deformation is at least 4 times larger than the reported detection threshold at low frequency (1 Hz), and up to 200 times larger for high-frequency vibration stimuli (> 100 Hz) [3]. Results shown in Figure 11 C further validated that our HaptiCoils can deliver perceptible force even under a high preload of 10 N. This is achieved because the hole structure limits the pressure transmitted to the internal fluid, effectively preventing the collapse of the speaker membrane. Figure 12 A shows that we can produce a stable output force during 1,800 cycles (10 s operation) at 180 Hz. The step response of a HaptiCoil is shown in Figure 12 B, with calculated rise and fall times of 2.1 ms and 2.6 ms. This fast speeds validate the effectiveness of using an in-compressible fluid for transmitting force.
5.2 Free Displacement
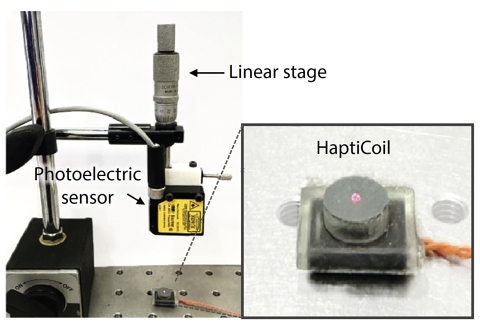
The surface deformation is also a crucial aspect of a haptic button, as it directly impacts haptic perception. Unlike the blocked force test, we measured the displacement of HaptiCoil without any external preload. To effectively stimulate the fingerpad, the required displacement of the haptic device varies depending on size and operating frequency of the device. In practical use, the output displacement of the HaptiCoil is less than free displacement due to the load from the skin (as described by our dynamic fingertip model), however these recordings still offer a good benchmark of performance. We recorded the output free displacement of HaptiCoils at various operating frequencies using a photoelectric sensor (Baumer CH-8501) and a data acquisition device (NI USB-6211). The focal point of the laser was controlled using a linear stage. Figure 13 shows the displacement measurement test setup. A sinusoidal signal was applied for 5 seconds, and the displacement and current were recorded simultaneously.
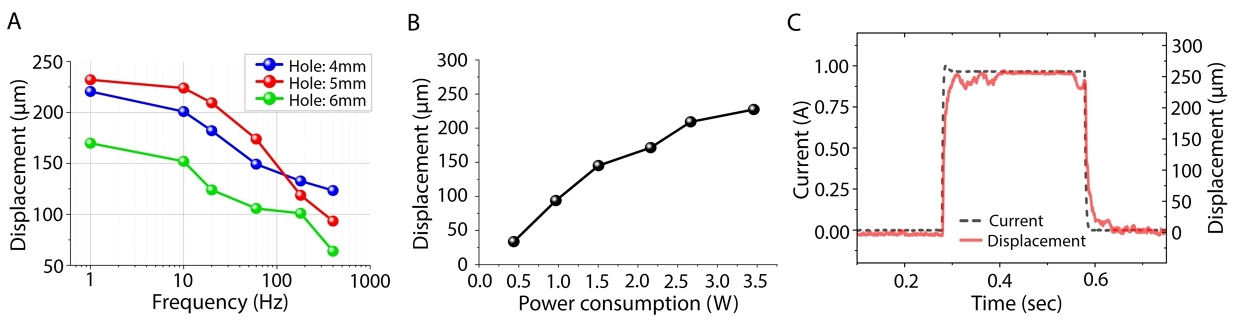
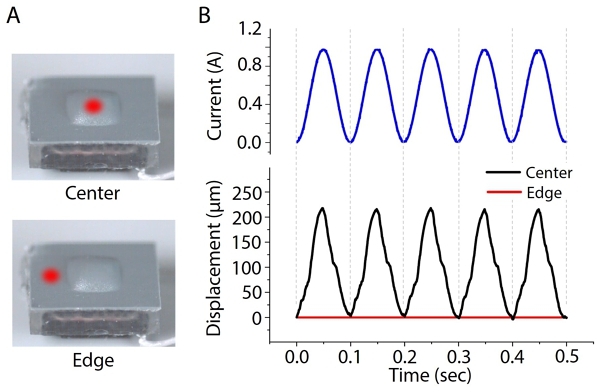
The displacement profiles of three HaptiCoils at various operating frequencies (1-400 Hz) are presented in Figure 14 A. During the experiment, the average input power was maintained at 2.7 W (current= 1 A). The results indicate that the HaptiCoil with a 5 mm hole size produced the largest displacement in low frequency range (1-60 Hz), with an estimated -3 dB bandwidth of approximately 70 Hz. Figure 14 B shows the peak displacement curve of a HaptiCoil (hole size = 5 mm) under different input power at a 10 Hz operation. Calculated rise and fall times to a step input are 14.7 ms and 19.4 ms, respectively, indicating rapid inflation and deflation speeds (see 14 C). Additionally, we compared the displacement at the center and edge of the HaptiCoil, as shown in Figure 15 A, to confirm that our actuator can produce pure localized displacement. The results in 15 B confirm that our actuator can produce a localized vibration at the surface with minimal displacement outside the touch surface, a result that is also felt qualitatively.
5.3 Force Sensing
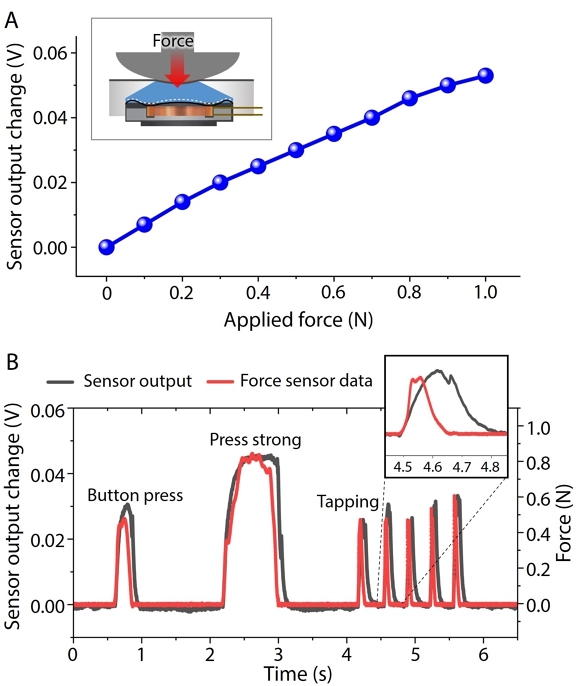
HaptiCoils can measure input force by monitoring the inductance of the coil, as introduced in Section 4.4. In Section 4.5, we presented the circuit to measure the inductance of the coil in real-time. Figure 16 A presents the sensed output profile of a complete HaptiCoil as a function of applied force. For this test, we used a motorized linear stage and a force sensor, identical to those used in the blocked force measurement test. The results demonstrated remarkably linear relationship between the sensor output and applied force within the range of 0-1 N. Figure 16 B compares the sensor output of the HaptiCoil to the reference force captured by the force sensor under touch input conditions with a real finger. Results demonstrated that the HaptiCoil could rapidly detect pressing forces with a 5 ms delay and releasing force with a 100 ms delay. We further investigated sensing performance of the HaptiCoil under an energized button-click scenario. The HaptiCoil was designed to provide click feedback during both the pressing and releasing phases of button interaction, as shown in Figure 17. A second-order digital biquadratic low-pass filter with a cut-off frequency of 1000 Hz was applied to the sensor output to reduce high-frequency vibration transients. Results showed that our self-inductance measurement is significantly affected by the applied impulse haptic signal. We hypothesize three main reasons for this, including: rapidly changing coil position (our main sensing effect), changes in flux due to large applied current (which we have measured by blocking coil displacement), and the limited common-mode rejection (CMRR) of our sensing pre-amplifier. Low frequency CMRR is also limited due to the small remaining resistance of our sense inductor (0.23 Ω). We believe these effects could be reduced or compensated for in future work, however to address this interference in this implementation sensor output was temporarily disregarded immediately after applying the haptic signal. This allowed for stabilization over a 100 ms period. While further investigation is needed to explore potential compensation methods, the findings confirmed that HaptiCoils can accurately monitor real-time, consecutive button presses at a high speed of 200 ms intervals. Furthermore, the HaptiCoil exhibited rapid response to sensor output, achieving a 0.8 ms delay and generating a 1.25 ms long haptic click.
6 PSYCHOPHYSICAL EVALUATION
We conducted preliminary psychophysical tests to assess users’ ability to perceive various haptic feedback from our HaptiCoil prototypes as compared to an industry baseline LRA. We measured the power detection thresholds of our HaptiCoils with a similarly sized LRA (JIE YI ELECTRONICS JYLRA1040ZF) at various frequencies. Power detection threshold is indicative of a device's energy efficiency, and, to some extent, its dynamic range, as we limited applied power to a fraction of a Watt. A small group of participants (N=4, mean age of 30, all identified as male) participated in both tests. Both psychophysical tests were fully automated, with participants recording yes or no answers on a keyboard.
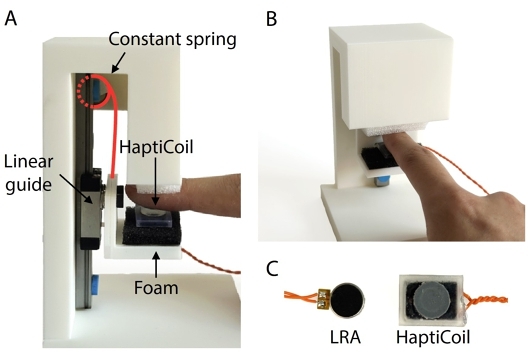
The power detection thresholds of our HaptiCoils and LRA were measured under sinusoidal input signals at four different frequencies: 10 Hz, 60 Hz, 180 Hz (resonance frequency of the LRA), and 500 Hz. Similar to the performance evaluation, we tested three HaptiCoils with varying hole sizes (3 mm, 4 mm, and 5 mm) and a 10 mm wide LRA. Figure 18 A shows the setup for the power detection threshold test. During the test, we ensured that the participants’ fingertips were fully engaged with the haptic devices under light contact pressure. Prior research indicates that this contact pressure is generally below 1 N of force [10, 41]. The test setup, which consists of a linear guide rail and a constant force spring (McMaster-Carr 1845N1), allowed participants to maintain a consistent contact force of 0.88 N, as shown in Figure 18 B. To eliminate any auditory cues, participants wore headphones playing pink noise. For each trial, a sinusoidal signal was applied to the speaker for 1 second, and the current flow through the HaptiCoils/LRA was recorded. For fair comparison, HaptiCoils were designed to have a identical contact area as the LRA shown in Figure 18 C.
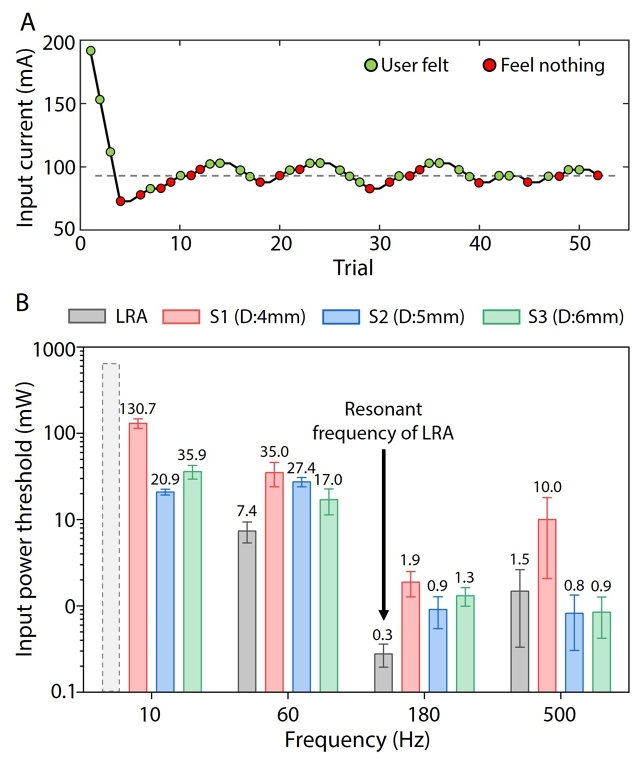
We utilized a descending transformed 1-up-2-down double staircase procedure to calculate the 70.7% detection response point on a psychometric curve [26]. As shown in Figure 19 A, the descending staircase began with an easily perceived amplitude, and participants were prompted by our measurement software if they could perceive the stimulus, responding with "Yes" or "No". If the response was "No," the vibration intensity was increased. If the response was "Yes," the same stimulus was reapplied. Once the participants gave two consecutive "Yes" responses, the vibration intensity was decreased. This procedure continued until 10 reversal responses were recorded, with the detection threshold determined by the mean of the last 6 reversals. The power detection threshold was calculated based on the measured current flow and resistance of the actuator. Additionally, we limited the maximum current to 150% of peak current listed in the speaker/LRA datasheet.
All participants demonstrated clearly converging staircases in their final six reversals. Figure 19 B illustrates the average power detection thresholds along with standard deviations. At its resonance (180 Hz), the LRA exhibited an extremely low input power threshold of 0.3 mW, as expected. However, none of the participants could perceive the LRA stimulus at 10Hz vibration, even with an input power exceeding 650 mW. The input power thresholds for the 5 mm diameter HaptiCoil (sample 2) were 3-4 times higher than the LRA at 60 Hz and 180 Hz. Conversely, this HaptiCoil demonstrated lower power thresholds at both low (10 Hz) and high frequencies (500 Hz), 21 mW and 0.8 mW respectively. We believe this clear result demonstrates the broad perceptual bandwidth capabilities of our prototypes, even with a small sample size. It also shows that the trade-off for broader range is reasonable, and compelling tactile effects can be generated by HaptiCoils without needing excessive applied power.
7 DEMO APPLICATIONS
We presented and validated our self-sensing HaptiCoil, demonstrating its ability to operate across a broad frequency range with high output capability and high input sensitivity. In this section, we showcase three example demonstration applications to highlight the versatility of our approach. The applications include a fingertip wearable device for XR interactions, stylus pen for digital inking, and a compact, multi-button remote control. Please also see our Video Figure for more information.
7.1 Fingertip Wearable XR Input Device
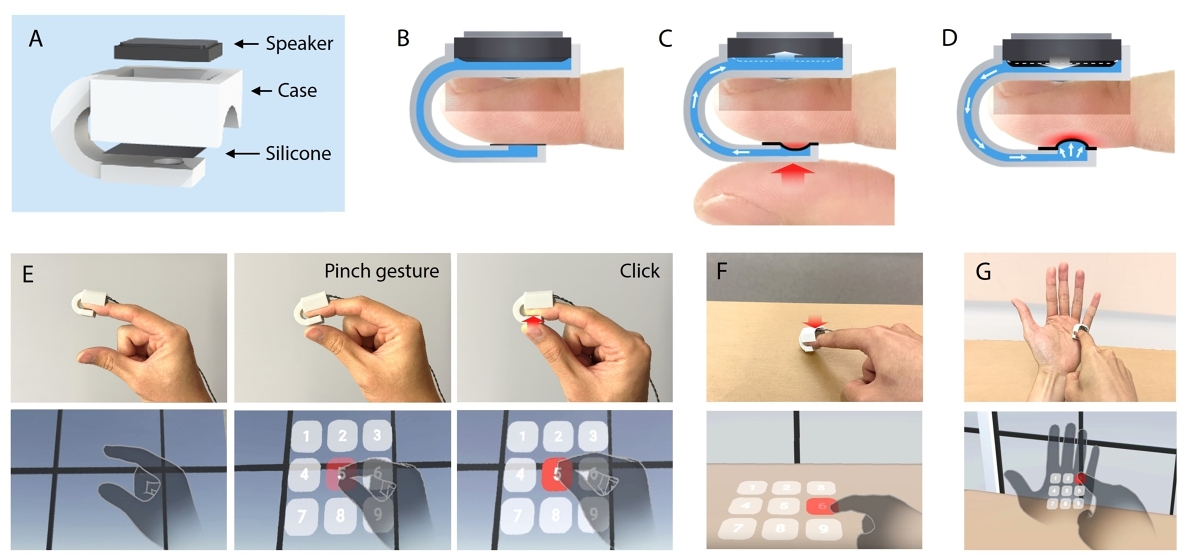
Due to their lightweight and compact nature, HaptiCoils are well suited for wearable applications. We built a small, indirect type HaptiCoil with the speaker mounted to the fingernail and the touch surface wrapped around the tip of the finger (Figures 20 A, B). Due to the sensitivity of the HaptiCoil's input, it can sense being put on, as this causes a slight deformation in the touch surface. Once fitted, the device can not only provide localized haptic feedback directly to the fingerpad (Figure 20 D), it can also detect force between the bottom of the case and the outside world, as shown in the scenarios seen in Figures 20 E, F, and G.
First, imagine an VR number input scenario, Figure 20 E, where a number pad is revealed when a user makes a typical pinch gesture (as detected by the head mounted device's on-board cameras). Now imagine the user can move their hand (while still holding the pinch gesture) and select a specific number from the group, confirming their selection by "clicking" on it via a force pinch. This confirmation is detected by the HaptiCoil and click feedback profiles clear communication to the user of their selection.
Next, a number pad can also be co-located with real physical surfaces, such as a workstation desktop, Figure 20 F. As the user's finger nears the desktop, the on-board cameras project their position to highlight an intended number. Once the user contacts the surface, they feel kinesthetic feedback from real grounded reaction force. If they continue pushing against this force, the HaptiCoil can detect an input force and trigger a click confirmation.
Finally, imagine a self-haptics scenario, where a number pad appears on the user's opposite hand once they turn their palm towards the on-board cameras. Similar to the grounded desktop, a user can push their finger against a specific location of their hand, selecting a button and receiving force appropriate click feedback to confirm their selection. In each of these 3 scenarios, the HaptiCoil serves as a wearable button, taking on different functions depending on the context of user interaction. In this sense, it a type of spatial computing equivalent of a traditional mouse-click. Of course, HaptiCoils can also be triggered due to totally virtual buttons, such as in Figure 1 C.
7.2 Digital Stylus with Force Sensing and Feedback
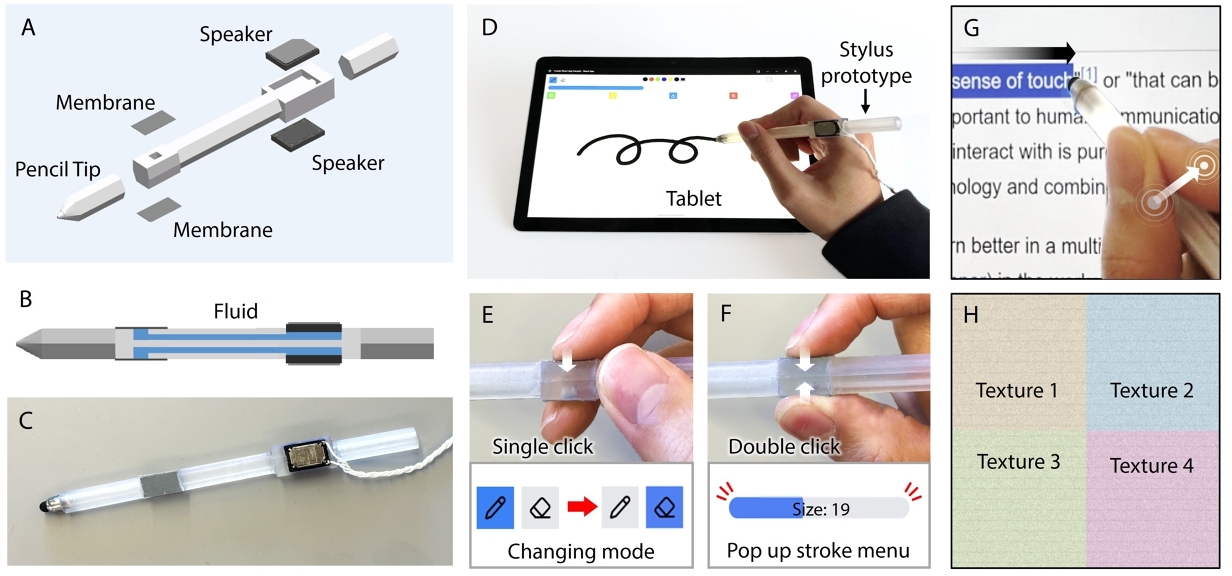
We also envisioned and built a 3D printed digital pen, complete with a conductive rubber pen tip, and two integrated counter firing HaptiCoils. The speakers were mounted near the rear of the device, and the output was routed to two small openings (4 × 4 mm) (seen Figure 21 A-C). This rear actuator configuration is similar to the latest Apple Pencil (which includes vibrotactile feedback); however, we use hydraulic channels to focus localized haptics into the compact space between the fingers near the tip of the pen, as it is difficult to place speakers in that area directly. Using hydraulic channels, the digital pen can achieve a compact structure similar to that of a commercial digital stylus, as shown in Figure 21 C.
We designed an example drawing application on a Surface Go tablet, as shown in Figure 21 D, to demonstrate haptic input and output. Single click input Figure 21 E is used to quickly switch between drawing and erasing modes, while a force pinch and drag "double-click" input is used to change stroke width (Figure 21 F). We also envision directional cues rendered to the user, by firing phase offset haptics to the index finger and thumb (Figure 21 G), a technique known to create apparent tactile motion. This motion can help indicate, for example, the rightward or leftward highlighting of text while reading an article. Finally, broadband tactile textures can be rendered via our HaptiCoils, depending on the virtual texture the pen is sliding across on screen, Figure 21 H, adding a sense of realism to the digital inking experience.
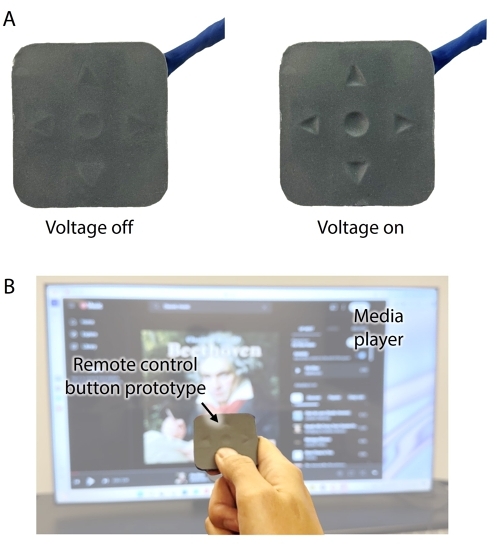
7.3 Multi-button Remote Control
For our final example, we built a low-profile programmable click remote control (total thickness of 7 mm, outside dimension 45 × 45 mm), as shown in Figure 22. This controller housed an array of 5 separate HaptiCoils, each sensed and driven independently. We designed the HaptiCoil output hole shapes to match an up, down, left, right, and center configuration, allowing users to feel the locations of the buttons without looking (Figure 22 A). We found that implementing multiple HaptiCoils in close proximity created minimal interference, however we could detect some subtle cross-talk in self-inductance baselines for particularly strong haptic effects. This effect, however, could be easily compensated, or even ignored, as buttons were only clicked one at a time. The use case for this example is a media player, where a user can pause or play the song by clicking on the center button, and skip forward or backwards using the right and left buttons. Clicking up and down allows them to change between songs. We implemented keyboard HID commands to emulate a keyboard media player, and programmed custom click sensations in our micro-controller.
8 LIMITATION AND FUTURE WORK
Although our HaptiCoils demonstrate promising advantages in terms of wide bandwidth and compact design, challenges remain regarding its low output force and displacement. This is primarily because the speaker we used was designed for acoustic purposes, not for haptics. We believe that the performance of the HaptiCoil can be significantly improved by optimizing the voice-coil. Specifically, increasing the BL factor and efficiency of the voice-coil through the use of a thicker coil with more turns should enhance its performance, and increasing max displacement by using a different suspension can increase output displacement. The HaptiCoil requires a larger coil area than the actuation area, which is the same as the hole size, to achieve a large deformation. Therefore, the ratio between the coil size and hole size should also be explored in the future to optimize the performance. Another challenge is generating static forces without overheating the coil due to the Joule heating. We do not claim to be capable of rendering static force now, as this is a well-known issue with electromagnetic approaches. The simplest solution to reduce heating effects, however, is to reduce the coil's resistance by using thicker wire. Alternatively, we could explore using a coolant as the fluid in the system to dissipate the heat generated in the coil more effectively. We also observed some performance degradation when a preload exceeding 1 N was applied. This occurred because the speaker was designed to have a soft membrane to maximize the acoustic pressure and mobility. The speaker membrane is fully deformed under high preloads, and unable to produce force sufficiently. This issue could be addressed by optimizing the mechanical impedance of the HaptiCoil to closely match that of the skin.
The sensing method we employed also presents challenges. First, cross-talk occurs between the coils and sensors in the circuit, as any signal current flowing through the voice-coil causes the shifting in inductance. This can make it difficult to provide continuous sensation while maintaining accurate touch sensing between coils. Additionally, we also observed subtle baseline shifts in the sensor output during operation similar to shifting baselines in self-capacitance measurements, which should be addressed further. As mentioned prior, applied current also shift self-inductance, and future work should look at compensating for this using a feed-forward model. This is intriguing, as it could lead to closed-loop position and force rendering, further increasing the haptic performance of HaptiCoils.
The dynamic performance of the HaptiCoil is highly influenced by inadvertent air bubbles in the fluid, as air is compressible and introduces compliance into the system. This invalidates our assumption of an in-compressible fluid. Consequently, degassing the air during fabrication becomes crucial, adding complexity to the process. We also encountered fluid loss over the course of days, which limits the long-term stability of the actuator. We believe this evaporation occurs primarily through the thin silicone membrane, and this could be minimized by optimizing the membrane selection or selecting a more suitable fluid. Another challenge we faced was fluid leakage, which can happen through any tiny holes. To prevent this, special attention to sealing during the fabrication is essential. Over-application of silicone sealant is effective, but messy. Additionally, the limited temperature range poses a constraint in particular applications due to potential vaporization or freezing of the water. It can be addressed by replacing the water with a fluid that has a higher vaporization temperature and lower freezing temperature. The durability of the silicone membrane is another concern, as its compliance makes it prone to punctures or tears. We believe that using a more robust silicone membrane, or covering with a thin, durable surface layer, could be a workable solution.
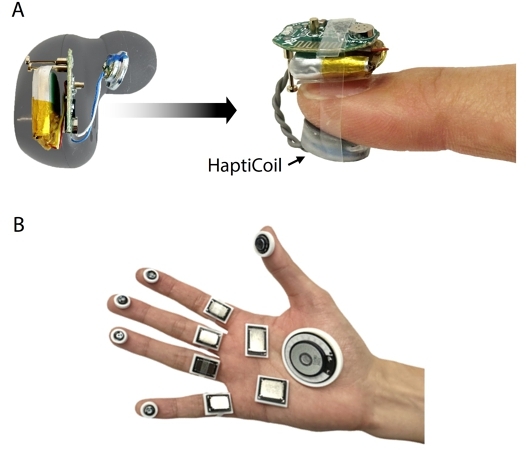
Although we selected a single microspeaker to demonstrate the potential of the HaptiCoil in this work, we believe that HaptiCoils could be easily fabricated in various designs and sizes. For instance, earbuds could be promising candidates for the HaptiCoil, as they already incorporate miniaturized circuit boards with Bluetooth communication and on-board power (see Figure 23 A). Additionally, Figure 23 B shows the potential for implementing of various speakers in the market to create a HaptiCoil haptic glove. Beyond minaturization of the electronics, we believe that HaptiCoils could also be miniaturized using the same techniques seen in these miniature speakers, i.e. careful 3D design, manufacture, and assembly. However this goes against the prototyping ethos of this method. Nonetheless, small moving coil actuators could be miniaturized and implemented with stiffer, compact suspensions and well defined contact points as opposed to explicitly using fluid as a coupling medium. This might help bring some advantages of moving coil actuators to mass production.
9 CONCLUSION
In this work, we presented HaptiCoil, a method of created wide-bandwidth (1-500 Hz) soft haptic buttons at a low-cost which are compact, and customizable. This approach combines the high bandwidth of the commoditized water proof speakers with the efficient power transmission of hydraulic coupling mechanisms to deliver versatile haptic feedback. Furthermore, our HaptiCoils can sense user force input by monitoring changes in the inductance of the coil.
We provided a comprehensive physical quantification of both actuation and sensing capabilities by measuring force, displacement, sensing behavior. Our physical evaluation demonstrates that the HaptiCoils can precisely detect human input and deliver wide-band localized tactile feedback. We also validated that our HaptiCoil offers a haptic stimuli with a broader perceptual range compared to an industry standard approaches the LRA, as confirmed through psycopysical evaluation. Finally, we showcased three implementations of our device: a fingertip XR wearable, a digital stylus, and a remote media control.
Acknowledgments
We would like to offer special thanks Wenzhen Yuan for loaning the use of her 3D printer, and Yanjun Chen for discussions on VR scenario.
References
- Deanna S. Asakawa, George H. Crocker, Adam Schmaltz, and Devin L. Jindrich. 2017. Fingertip forces and completion time for index finger and thumb touchscreen gestures. Journal of Electromyography and Kinesiology 34 (June 2017), 6–13. https://doi.org/10.1016/j.jelekin.2017.02.007
- Shantonu Biswas and Yon Visell. 2019. Emerging Material Technologies for Haptics. Advanced Materials Technologies 4, 4 (2019), 1900042. https://doi.org/10.1002/admt.201900042 _eprint: https://onlinelibrary.wiley.com/doi/pdf/10.1002/admt.201900042.
- S. J. Bolanowski, Jr., G. A. Gescheider, R. T. Verrillo, and C. M. Checkosky. 1988. Four channels mediate the mechanical aspects of touch. The Journal of the Acoustical Society of America 84, 5 (Nov. 1988), 1680–1694. https://doi.org/10.1121/1.397184
- Hsiang-Yu Chen, Jaeyoung Park, Steve Dai, and Hong Z. Tan. 2011. Design and Evaluation of Identifiable Key-Click Signals for Mobile Devices. IEEE Transactions on Haptics 4, 4 (Oct. 2011), 229–241. https://doi.org/10.1109/TOH.2011.21
- Yanjun Chen, Xuewei Liang, Si Chen, Yuwen Chen, Hongnan Lin, Hechuan Zhang, Chutian Jiang, Feng Tian, Yu Zhang, Shanshan Yao, and Teng Han. 2022. HapTag: A Compact Actuator for Rendering Push-Button Tactility on Soft Surfaces. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology(UIST ’22). Association for Computing Machinery, New York, NY, USA, 1–11. https://doi.org/10.1145/3526113.3545644
- Kyung Yun Choi, Jinmo Lee, Neska ElHaouij, Rosalind Picard, and Hiroshi Ishii. 2021. aSpire: Clippable, Mobile Pneumatic-Haptic Device for Breathing Rate Regulation via Personalizable Tactile Feedback. In Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems(CHI EA ’21). Association for Computing Machinery, New York, NY, USA, 1–8. https://doi.org/10.1145/3411763.3451602
- Seungmoon Choi and Katherine J. Kuchenbecker. 2013. Vibrotactile Display: Perception, Technology, and Applications. Proc. IEEE 101, 9 (Sept. 2013), 2093–2104. https://doi.org/10.1109/JPROC.2012.2221071
- Artem Dementyev, Pascal Getreuer, Dimitri Kanevsky, Malcolm Slaney, and Richard F Lyon. 2021. VHP: Vibrotactile Haptics Platform for On-body Applications. In The 34th Annual ACM Symposium on User Interface Software and Technology(UIST ’21). Association for Computing Machinery, New York, NY, USA, 598–612. https://doi.org/10.1145/3472749.3474772
- Artem Dementyev, Alex Olwal, and Richard F. Lyon. 2020. Haptics with Input: Back-EMF in Linear Resonant Actuators to Enable Touch, Pressure and Environmental Awareness. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology(UIST ’20). Association for Computing Machinery, New York, NY, USA, 420–429. https://doi.org/10.1145/3379337.3415823
- Alan K. Goble, Amy A. Collins, and Roger W. Cholewiak. 1996. Vibrotactile threshold in young and old observers: The effects of spatial summation and the presence of a rigid surround. The Journal of the Acoustical Society of America 99, 4 (April 1996), 2256–2269. https://doi.org/10.1121/1.415413
- Mayank Goel, Jacob Wobbrock, and Shwetak Patel. 2012. GripSense: using built-in sensors to detect hand posture and pressure on commodity mobile phones. In Proceedings of the 25th annual ACM symposium on User interface software and technology(UIST ’12). Association for Computing Machinery, New York, NY, USA, 545–554. https://doi.org/10.1145/2380116.2380184
- Sebastian Gratz-Kelly, Tim Krüger, Gianluca Rizzello, Stefan Seelecke, and Giacomo Moretti. 2023. An audio-tactile interface based on dielectric elastomer actuators. Smart Materials and Structures 32, 3 (Feb. 2023), 034005. https://doi.org/10.1088/1361-665X/acb6da Publisher: IOP Publishing.
- Nur Al-huda Hamdan, Adrian Wagner, Simon Voelker, Jürgen Steimle, and Jan Borchers. 2019. Springlets: Expressive, Flexible and Silent On-Skin Tactile Interfaces. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems(CHI ’19). Association for Computing Machinery, New York, NY, USA, 1–14. https://doi.org/10.1145/3290605.3300718
- Teng Han, Fraser Anderson, Pourang Irani, and Tovi Grossman. 2018. HydroRing: Supporting Mixed Reality Haptics Using Liquid Flow. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology(UIST ’18). Association for Computing Machinery, New York, NY, USA, 913–925. https://doi.org/10.1145/3242587.3242667
- Chris Harrison and Scott E. Hudson. 2009. Providing dynamically changeable physical buttons on a visual display. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems(CHI ’09). Association for Computing Machinery, New York, NY, USA, 299–308. https://doi.org/10.1145/1518701.1518749
- Inwook Hwang, Seongcheol Mun, Jung-Hwan Youn, Hyeong Jun Kim, Seung Koo Park, Meejeong Choi, Tae June Kang, Qibing Pei, and Sungryul Yun. 2024. Height-renderable morphable tactile display enabled by programmable modulation of local stiffness in photothermally active polymer. Nature Communications 15, 1 (March 2024), 2554. https://doi.org/10.1038/s41467-024-46709-7 Publisher: Nature Publishing Group.
- Xiaobin Ji, Xinchang Liu, Vito Cacucciolo, Yoan Civet, Alae El Haitami, Sophie Cantin, Yves Perriard, and Herbert Shea. 2021. Untethered Feel-Through Haptics Using 18-μm Thick Dielectric Elastomer Actuators. Advanced Functional Materials 31, 39 (2021), 2006639. https://doi.org/10.1002/adfm.202006639 _eprint: https://onlinelibrary.wiley.com/doi/pdf/10.1002/adfm.202006639.
- Peter W. Johnson, Mats Hagberg, E. Wigaeus Hjelm, and David Rempel. 2000. Measuring and characterizing force exposure during computer mouse use. Scandinavian Journal of Work, Environment & Health 26, 5 (2000), 398–405. https://doi.org/10.5271/sjweh.560
- Erin Kim and Oliver Schneider. 2020. Defining Haptic Experience: Foundations for Understanding, Communicating, and Evaluating HX. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems(CHI ’20). Association for Computing Machinery, New York, NY, USA, 1–13. https://doi.org/10.1145/3313831.3376280
- Hwan Kim, Minhwan Kim, and Woohun Lee. 2016. HapThimble: A Wearable Haptic Device towards Usable Virtual Touch Screen. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems(CHI ’16). Association for Computing Machinery, New York, NY, USA, 3694–3705. https://doi.org/10.1145/2858036.2858196
- Jeong Ho Kim, Lovenoor Aulck, Michael C. Bartha, Christy A. Harper, and Peter W. Johnson. 2014. Differences in typing forces, muscle activity, comfort, and typing performance among virtual, notebook, and desktop keyboards. Applied Ergonomics 45, 6 (Nov. 2014), 1406–1413. https://doi.org/10.1016/j.apergo.2014.04.001
- Jin Hee (Heather) Kim, Joan Stilling, Michael O'Dell, and Cindy Hsin-Liu Kao. 2023. KnitDema: Robotic Textile as Personalized Edema Mobilization Device. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems(CHI ’23). Association for Computing Machinery, New York, NY, USA, 1–19. https://doi.org/10.1145/3544548.3581343
- Sunjun Kim and Geehyuk Lee. 2013. Haptic feedback design for a virtual button along force-displacement curves. In Proceedings of the 26th annual ACM symposium on User interface software and technology(UIST ’13). Association for Computing Machinery, New York, NY, USA, 91–96. https://doi.org/10.1145/2501988.2502041
- Dae-Young Lee, Seung Hee Jeong, Andy J. Cohen, Daniel M. Vogt, Matthias Kollosche, Geoffrey Lansberry, Yiğit Mengüç, Ali Israr, David R. Clarke, and Robert J. Wood. 2022. A Wearable Textile-Embedded Dielectric Elastomer Actuator Haptic Display. Soft Robotics 9, 6 (Dec. 2022), 1186–1197. https://doi.org/10.1089/soro.2021.0098 Publisher: Mary Ann Liebert, Inc., publishers.
- Edouard Leroy, Ronan Hinchet, and Herbert Shea. 2020. Multimode Hydraulically Amplified Electrostatic Actuators for Wearable Haptics. Advanced Materials 32, 36 (2020), 2002564. https://doi.org/10.1002/adma.202002564 _eprint: https://onlinelibrary.wiley.com/doi/pdf/10.1002/adma.202002564.
- H. Levitt. 1971. Transformed Up‐Down Methods in Psychoacoustics. The Journal of the Acoustical Society of America 49, 2B (Feb. 1971), 467–477. https://doi.org/10.1121/1.1912375
- Dengfeng Li, Jingkun Zhou, Kuanming Yao, Sitong Liu, Jiahui He, Jingyou Su, Qing'ao Qu, Yuyu Gao, Zhen Song, Chunki Yiu, Chuanlu Sha, Zhi Sun, Binbin Zhang, Jian Li, Libei Huang, Chenyu Xu, Tsz Hung Wong, Xingcan Huang, Jiyu Li, Ruquan Ye, Lei Wei, Zhengyou Zhang, Xu Guo, Yuan Dai, Zhaoqian Xie, and Xinge Yu. 2022. Touch IoT enabled by wireless self-sensing and haptic-reproducing electronic skin. Science Advances 8, 51 (Dec. 2022), eade2450. https://doi.org/10.1126/sciadv.ade2450 Publisher: American Association for the Advancement of Science.
- Hongnan Lin, Liang He, Fangli Song, Yifan Li, Tingyu Cheng, Clement Zheng, Wei Wang, and HyunJoo Oh. 2022. FlexHaptics: A Design Method for Passive Haptic Inputs Using Planar Compliant Structures. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems(CHI ’22). Association for Computing Machinery, New York, NY, USA, 1–13. https://doi.org/10.1145/3491102.3502113
- Hongnan Lin, Xuanyou Liu, Shengsheng Jiang, Qi Wang, Ye Tao, Guanyun Wang, Wei Sun, Teng Han, and Feng Tian. 2024. TacTex: A Textile Interface with Seamlessly-Integrated Electrodes for High-Resolution Electrotactile Stimulation. In Proceedings of the CHI Conference on Human Factors in Computing Systems(CHI ’24). Association for Computing Machinery, New York, NY, USA, 1–16. https://doi.org/10.1145/3613904.3642873
- Jack Lindsay, Richard J. Adams, and Blake Hannaford. 2013. Improving tactile feedback with an impedance adapter. In 2013 World Haptics Conference (WHC). 713–718. https://doi.org/10.1109/WHC.2013.6548496
- Yuhu Liu, Satoshi Nishikawa, Young ah Seong, Ryuma Niiyama, and Yasuo Kuniyoshi. 2021. ThermoCaress: A Wearable Haptic Device with Illusory Moving Thermal Stimulation. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems(CHI ’21). Association for Computing Machinery, New York, NY, USA, 1–12. https://doi.org/10.1145/3411764.3445777
- Jani Lylykangas, Veikko Surakka, Katri Salminen, Jukka Raisamo, Pauli Laitinen, Kasper Rönning, and Roope Raisamo. 2011. Designing tactile feedback for piezo buttons. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems(CHI ’11). Association for Computing Machinery, New York, NY, USA, 3281–3284. https://doi.org/10.1145/1978942.1979428
- Yuxin Ma, Tianze Xie, Peng Zhang, Hwan Kim, and Seungwoo Je. 2024. AirPush: A Pneumatic Wearable Haptic Device Providing Multi-Dimensional Force Feedback on a Fingertip. In Proceedings of the CHI Conference on Human Factors in Computing Systems(CHI ’24). Association for Computing Machinery, New York, NY, USA, 1–13. https://doi.org/10.1145/3613904.3642536
- Alex Mazursky, Shan-Yuan Teng, Romain Nith, and Pedro Lopes. 2021. MagnetIO: Passive yet Interactive Soft Haptic Patches Anywhere. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems(CHI ’21). Association for Computing Machinery, New York, NY, USA, 1–15. https://doi.org/10.1145/3411764.3445543
- Moritz Alexander Messerschmidt, Sachith Muthukumarana, Nur Al-Huda Hamdan, Adrian Wagner, Haimo Zhang, Jan Borchers, and Suranga Chandima Nanayakkara. 2022. ANISMA: A Prototyping Toolkit to Explore Haptic Skin Deformation Applications Using Shape-Memory Alloys. ACM Trans. Comput.-Hum. Interact. 29, 3 (2022), 19:1–19:34. https://doi.org/10.1145/3490497
- Hila Mor, Tianyu Yu, Ken Nakagaki, Benjamin Harvey Miller, Yichen Jia, and Hiroshi Ishii. 2020. Venous Materials: Towards Interactive Fluidic Mechanisms. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems. ACM, Honolulu HI USA, 1–14. https://doi.org/10.1145/3313831.3376129
- Bruce J. P. Mortimer, Gary A. Zets, and Roger W. Cholewiak. 2007. Vibrotactile transduction and transducers. The Journal of the Acoustical Society of America 121, 5 Pt1 (May 2007), 2970–2977. https://doi.org/10.1121/1.2715669
- Ken Nakagaki, Daniel Fitzgerald, Zhiyao (John) Ma, Luke Vink, Daniel Levine, and Hiroshi Ishii. 2019. inFORCE: Bi-directional ‘Force’ Shape Display for Haptic Interaction. In Proceedings of the Thirteenth International Conference on Tangible, Embedded, and Embodied Interaction(TEI ’19). Association for Computing Machinery, New York, NY, USA, 615–623. https://doi.org/10.1145/3294109.3295621
- Claudio Pacchierotti, Stephen Sinclair, Massimiliano Solazzi, Antonio Frisoli, Vincent Hayward, and Domenico Prattichizzo. 2017. Wearable Haptic Systems for the Fingertip and the Hand: Taxonomy, Review, and Perspectives. EEE Trans. Haptics 10, 4 (2017), 580–600. https://doi.org/10.1109/TOH.2017.2689006
- Chaeyong Park, Jinhyuk Yoon, Seungjae Oh, and Seungmoon Choi. 2020. Augmenting Physical Buttons with Vibrotactile Feedback for Programmable Feels. In Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology(UIST ’20). Association for Computing Machinery, New York, NY, USA, 924–937. https://doi.org/10.1145/3379337.3415837
- D. T. Pawluk and R. D. Howe. 1999. Dynamic contact of the human fingerpad against a flat surface. Journal of Biomechanical Engineering 121, 6 (Dec. 1999), 605–611. https://doi.org/10.1115/1.2800860
- Pornthep Preechayasomboon and Eric Rombokas. 2021. Haplets: Finger-Worn Wireless and Low-Encumbrance Vibrotactile Haptic Feedback for Virtual and Augmented Reality. Frontiers in Virtual Reality 2 (Sept. 2021). https://doi.org/10.3389/frvir.2021.738613 Publisher: Frontiers.
- Purnendu, Jess Hartcher-O'Brien, Vatsal Mehta, Nicholas Colonnese, Aakar Gupta, Carson J. Bruns, and Priyanshu Agarwal. 2023. Fingertip Wearable High-resolution Electrohydraulic Interface for Multimodal Haptics. In 2023 IEEE World Haptics Conference (WHC). 299–305. https://doi.org/10.1109/WHC56415.2023.10224383 ISSN: 2835-9534.
- Tucker Rae-Grant, Chris Harrison, and Craig Shultz. 2024. DynaButtons: Fast Interactive Soft Buttons with Analog Control. In 2024 IEEE Haptics Symposium (HAPTICS). 366–371. https://doi.org/10.1109/HAPTICS59260.2024.10520864 ISSN: 2324-7355.
- Jun Rekimoto. 2013. Traxion: a tactile interaction device with virtual force sensation. In Proceedings of the 26th annual ACM symposium on User interface software and technology(UIST ’13). Association for Computing Machinery, New York, NY, USA, 427–432. https://doi.org/10.1145/2501988.2502044
- Samuel Rosset, Benjamin M. O'Brien, Todd Gisby, Daniel Xu, Herbert R. Shea, and Iain A. Anderson. 2013. Self-sensing dielectric elastomer actuators in closed-loop operation. Smart Materials and Structures 22, 10 (Sept. 2013), 104018. https://doi.org/10.1088/0964-1726/22/10/104018 Publisher: IOP Publishing.
- Alex Russomanno, Zhentao Xu, Sile O'Modhrain, and Brent Gillespie. 2017. A pneu shape display: Physical buttons with programmable touch response. In 2017 IEEE World Haptics Conference (WHC). 641–646. https://doi.org/10.1109/WHC.2017.7989976
- Oliver Schneider, Karon MacLean, Colin Swindells, and Kellogg Booth. 2017. Haptic experience design: What hapticians do and where they need help. International Journal of Human-Computer Studies 107 (Nov. 2017), 5–21. https://doi.org/10.1016/j.ijhcs.2017.04.004
- Sougata Sen and David Kotz. 2020. VibeRing: using vibrations from a smart ring as an out-of-band channel for sharing secret keys. In Proceedings of the 10th International Conference on the Internet of Things(IoT ’20). Association for Computing Machinery, New York, NY, USA, 1–8. https://doi.org/10.1145/3410992.3410995
- Vivian Shen, Chris Harrison, and Craig Shultz. 2024. Expressive, Scalable, Mid-air Haptics with Synthetic Jets. ACM Trans. Comput.-Hum. Interact. 31, 2 (2024), 14:1–14:28. https://doi.org/10.1145/3635150
- Vivian Shen, Tucker Rae-Grant, Joe Mullenbach, Chris Harrison, and Craig Shultz. 2023. Fluid Reality: High-Resolution, Untethered Haptic Gloves using Electroosmotic Pump Arrays. In Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology(UIST ’23). Association for Computing Machinery, New York, NY, USA, 1–20. https://doi.org/10.1145/3586183.3606771
- Ali Shtarbanov. 2021. FlowIO Development Platform – the Pneumatic “Raspberry Pi” for Soft Robotics. In Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems(CHI EA ’21). Association for Computing Machinery, New York, NY, USA, 1–6. https://doi.org/10.1145/3411763.3451513
- Craig Shultz and Chris Harrison. 2022. LRAir: Non-contact Haptics Using Synthetic Jets. In 2022 IEEE Haptics Symposium (HAPTICS). https://doi.org/10.1109/HAPTICS52432.2022.9765565
- Craig Shultz and Chris Harrison. 2023. Flat Panel Haptics: Embedded Electroosmotic Pumps for Scalable Shape Displays. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems(CHI ’23). Association for Computing Machinery, New York, NY, USA, 1–16. https://doi.org/10.1145/3544548.3581547
- Kahye Song, Sung Hee Kim, Sungho Jin, Sohyun Kim, Sunho Lee, Jun-Sik Kim, Jung-Min Park, and Youngsu Cha. 2019. Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system. Scientific Reports 9, 1 (July 2019), 8988. https://doi.org/10.1038/s41598-019-45422-6 Publisher: Nature Publishing Group.
- Andrew A. Stanley, Erik S. Roby, and Sean J. Keller. 2024. High-speed fluidic processing circuits for dynamic control of haptic and robotic systems. Science Advances 10, 14 (April 2024), eadl3014. https://doi.org/10.1126/sciadv.adl3014 Publisher: American Association for the Advancement of Science.
- Takashi Suzuki. 2024. Enhancing the Human Tactile Sensitivity through an Individually Optimized Imperceptible Vibration Stimulation. In Extended Abstracts of the 2024 CHI Conference on Human Factors in Computing Systems(CHI EA ’24). Association for Computing Machinery, New York, NY, USA, 1–6. https://doi.org/10.1145/3613905.3650826
- Shan-Yuan Teng, Pengyu Li, Romain Nith, Joshua Fonseca, and Pedro Lopes. 2021. Touch&Fold: A Foldable Haptic Actuator for Rendering Touch in Mixed Reality. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems(CHI ’21). Association for Computing Machinery, New York, NY, USA, 1–14. https://doi.org/10.1145/3411764.3445099
- Yu-Chih Tung and Kang G. Shin. 2016. Expansion of Human-Phone Interface By Sensing Structure-Borne Sound Propagation. In Proceedings of the 14th Annual International Conference on Mobile Systems, Applications, and Services(MobiSys ’16). Association for Computing Machinery, New York, NY, USA, 277–289. https://doi.org/10.1145/2906388.2906394
- Ryusei Uramune, Hiroki Ishizuka, Takefumi Hiraki, Yoshihiro Kawahara, Sei Ikeda, and Osamu Oshiro. 2020. HaPouch: Soft and Wearable Haptic Display Devices using Liquid-to-gas Phase Change Actuator. In Adjunct Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology(UIST ’20 Adjunct). Association for Computing Machinery, New York, NY, USA, 53–55. https://doi.org/10.1145/3379350.3416183
- Keigo Ushiyama and Pedro Lopes. 2023. FeetThrough: Electrotactile Foot Interface that Preserves Real-World Sensations. In Proceedings of the 36th Annual ACM Symposium on User Interface Software and Technology(UIST ’23). Association for Computing Machinery, New York, NY, USA, 1–11. https://doi.org/10.1145/3586183.3606808
- Velko Vechev, Juan Zarate, David Lindlbauer, Ronan Hinchet, Herbert Shea, and Otmar Hilliges. 2019. TacTiles: Dual-Mode Low-Power Electromagnetic Actuators for Rendering Continuous Contact and Spatial Haptic Patterns in VR. In 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR). 312–320. https://doi.org/10.1109/VR.2019.8797921 Conference Name: 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) ISBN: 9781728113777 Place: Osaka, Japan Publisher: IEEE.
- Xiaosong Wu, Seong-Hyok Kim, Haihong Zhu, Chang-Hyeon Ji, and Mark G. Allen. 2012. A Refreshable Braille Cell Based on Pneumatic Microbubble Actuators. Journal of Microelectromechanical Systems 21, 4 (Aug. 2012), 908–916. https://doi.org/10.1109/JMEMS.2012.2190043 Conference Name: Journal of Microelectromechanical Systems.
- Songlin Xu, Zhiyuan Wu, Shunhong Wang, Rui Fan, and Nan Lin. 2020. Hydrauio: Extending Interaction Space on the Pen through Hydraulic Sensing and Haptic Output. In Adjunct Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology(UIST ’20 Adjunct). Association for Computing Machinery, New York, NY, USA, 43–45. https://doi.org/10.1145/3379350.3416180
- Hsin-Yun Yao and Vincent Hayward. 2010. Design and analysis of a recoil-type vibrotactile transducer. The Journal of the Acoustical Society of America 128, 2 (Aug. 2010), 619–627. https://doi.org/10.1121/1.3458852
- Lining Yao, Ryuma Niiyama, Jifei Ou, Sean Follmer, Clark Della Silva, and Hiroshi Ishii. 2013. PneUI: pneumatically actuated soft composite materials for shape changing interfaces. In Proceedings of the 26th annual ACM symposium on User interface software and technology(UIST ’13). Association for Computing Machinery, New York, NY, USA, 13–22. https://doi.org/10.1145/2501988.2502037
- Sang Ho Yoon, Siyuan Ma, Woo Suk Lee, Shantanu Thakurdesai, Di Sun, Flávio P. Ribeiro, and James D. Holbery. 2019. HapSense: A Soft Haptic I/O Device with Uninterrupted Dual Functionalities of Force Sensing and Vibrotactile Actuation. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology(UIST ’19). Association for Computing Machinery, New York, NY, USA, 949–961. https://doi.org/10.1145/3332165.3347888
- Jung-Hwan Youn, Seung-Mo Jeong, Young-Seok Choi, and Ki-Uk Kyung. 2019. A Soft Tactile Display Using Dielectric Elastomer Actuator for Fingertip Interaction. In Haptic Interaction, Hiroyuki Kajimoto, Dongjun Lee, Sang-Youn Kim, Masashi Konyo, and Ki-Uk Kyung (Eds.). Springer, Singapore, 15–17. https://doi.org/10.1007/978-981-13-3194-7_4
- Jung-Hwan Youn, Heeju Mun, and Ki-Uk Kyung. 2021. A Wearable Soft Tactile Actuator With High Output Force for Fingertip Interaction. IEEE Access 9 (2021), 30206–30215. https://doi.org/10.1109/ACCESS.2021.3058979
- Jung-Hwan Youn, Ibrahim Bin Yasir, and Ki-Uk Kyung. 2020. Self-sensing Soft Tactile Actuator for Fingertip Interface. In 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 8939–8944. https://doi.org/10.1109/IROS45743.2020.9341087 ISSN: 2153-0866.
- Eric M. Young, Amirhossein H. Memar, Priyanshu Agarwal, and Nicholas Colonnese. 2019. Bellowband: A Pneumatic Wristband for Delivering Local Pressure and Vibration. In 2019 IEEE World Haptics Conference (WHC). https://doi.org/10.1109/WHC.2019.8816075
- Bowen Zhang and Misha Sra. 2021. PneuMod: A Modular Haptic Device with Localized Pressure and Thermal Feedback. In Proceedings of the 27th ACM Symposium on Virtual Reality Software and Technology(VRST ’21). Association for Computing Machinery, New York, NY, USA, 1–7. https://doi.org/10.1145/3489849.3489857
- Clement Zheng, Zhen Zhou Yong, Hongnan Lin, HyunJoo Oh, and Ching Chiuan Yen. 2022. Shape-Haptics: Planar & Passive Force Feedback Mechanisms for Physical Interfaces. In Proceedings of the 2022 CHI Conference on Human Factors in Computing Systems(CHI ’22). Association for Computing Machinery, New York, NY, USA, 1–15. https://doi.org/10.1145/3491102.3501829

This work is licensed under a Creative Commons Attribution 4.0 International License.
CHI '25, Yokohama, Japan
© 2025 Copyright held by the owner/author(s).
ACM ISBN 979-8-4007-1394-1/25/04.
DOI: https://doi.org/10.1145/3706598.3713175